
国際特許分類[G01S13/91]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783) | 交通制御用のもの (112)
国際特許分類[G01S13/91]の下位に属する分類
速度測定のためのもの (1)
国際特許分類[G01S13/91]に分類される特許
101 - 110 / 111
モードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法
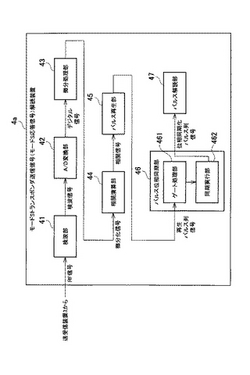
【課題】モードSトランスポンダから送信された信号を正確に解読することが可能なモードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法を提供する。
【解決手段】モードSトランスポンダ送信信号に対して微分処理を行う微分処理部43と、微分処理がなされた信号における強度の上昇変化率と下降変化率との相関の度合を演算する相関演算部44と、相関演算処理により得られた相関の度合に基づいてパルスを再生するパルス再生部45と、再生されたパルスに対してゲート処理と位相同期処理とを行うパルス位相同期部46と、ゲート処理と位相同期処理とがなされたパルスを基にモードSトランスポンダ送信信号を解読するパルス解読部47とを設ける。
(もっと読む)
道路鋲

【課題】 簡易な構成で実現することが可能な道路鋲を提供する。
【解決手段】 本発明は、道路に設置されるための道路鋲である。道路鋲は、検知部と、判定部と、警告出力部とを備えている。検知部は、車両に搭載される車載レーダから出射されたレーダビームを検知する。判定部は、検知部による検知結果に基づいて、自機に近づく車両が存在するか否かを判定する。警告出力部は、判定部によって自機に近づく車両が存在すると判定された場合、音または光で警告を発する。
(もっと読む)
レーダの設置情報の確認画面と調整画面の表示方法
【課題】
道路付近に設置したレーダの設置位置や設置方向の確認や調整を容易に行う。
【解決手段】
レーダの傍らにカメラを設置してレーダとカメラの相対位置と相対方向を冶具により所定値に保持しておき、カメラの画像中の所定物標を空間の座標系により点もしくは直線で定義し、所定の幾何式で計算した上記点あるいは直線の投影をカメラの画像上に描画したオーバレイ画面を合成して表示する。
オーバレイ画面中においての物標と描画物が一致していない場合、物標と描画物との表示位置が一致するように処理装置内のデータを調整するユーザインタフェース画面を表示して処理装置内のデータを調整することで、道路中と処理端末内のレーダの設置位置や設置方向が一致するよう画面上で調整できる。
(もっと読む)
二次監視レーダシステムとその地上装置
【課題】トランスポンダを確実に捕捉できるようにし、これにより航空機の安全運行への寄与を高め得る二次監視レーダシステムとその地上装置を提供すること。
【解決手段】エラー判定処理においてPIフィールドの値とサイトIDの比較に加え、PIフィールドの値と“0”との比較を行うようにしている。また、サイトIDまたは“0”のいずれと一致したかを区別するための分別情報を、応答信号に付加するようにしている。これにより、モードS専用オールコール質問に対してPIフィールドの値が“0”で応答する不良モードSトランスポンダを捕捉することが可能になる。
(もっと読む)
自動駐車システム
【課題】 自動駐車のための設定を駐車場以外の場所で、駐車場の環境に依存せずに設定可能であり、かつ、車両が駐車場に近付いた時点で自動駐車モードに入れる利便性の高い自動誘導システムを提供すること。
【解決手段】 電波マーカ2は、駐車スペースおよびその周辺に複数設置され、それぞれ位置情報を有する。検出器1は電波マーカ2と無線通信が可能であり、現在位置を取得する現在位置取得部17と、駐車スペースの寸法や複数の電波マーカ2の配置位置を示す配置情報を記憶する設定記憶部16と、受信アンテナ13a、13b、13cで受信した信号の信号レベルに基づいて電波マーカまでの距離を検出して電波マーカの位置を取得し、複数の電波マーカ2の位置を取得することにより配置情報を参照して現在位置と複数の電波マーカ2の配置との位置関係を特定する位置検出部18とを備える。自動運転制御装置3は特定された位置関係に基づいて車両の自動駐車を行う。
(もっと読む)
センシング手段及び接近警告システム
【課題】降雨や降雪による誤検知が考え得る場所に設置した場合に、誤検知の発生頻度を低減することができるセンシング手段及び接近警告システムを提供する。
【解決手段】電波発信部1及び電波受信部2が斜め下方に向けられていることで、重力によって下方に向けて進行する雨滴Aや雪粒Yは電波発信部1及び電波受信部2から全て遠ざかる方向に進行するようになり、電波受信部2から遠ざかる方向に進行する移動体から生じる反射波R2を検知対象から排除することで、かかる雨滴Aや雪粒Yにより生じる反射波R2に起因する誤検知の発生頻度を低減することができる。また電波受信部2から遠ざかる方向に進行する移動体を検知対象から排除するのみであるから、判別手段3を簡便なものとできる。
【参照図】 図2
(もっと読む)
高度計装置、及び、距離計算方法
【課題】 自己が信号を発することなく、自己の高度を計測する高度計装置を得る。
【解決手段】 この発明の高度計装置30は、飛行体11の上部に第1の受信系(第1の受信アンテナ23aと第1の受信部33)を設け、飛行体11の下部に第2の受信系(第2の受信アンテナ23bと第2の受信部35)を設け、準天頂衛星201が送信した直接波の測位信号203を第1の受信系により受信して、測位信号203の反射波の信号205を第2の受信系により受信する。さらに、信号処理部37を備えて直接波と反射波との時間差を求め、求めた時間差に対して光速を乗じて距離を求めて、求めた距離の半分を反射点から自己までの高度(距離)とする。
(もっと読む)
アンテナの同期回転装置
【課題】 航空機の管制に使用する空港面探知レーダ等のレーダシステムは複数のレーダ装置を使用する。このとき複数のアンテナは互いに同期して回転させなければならない。そのため一つの角度信号を複数のレーダ装置に配信しなければならず、配線設備コストが高くなるという課題があった。複数の空中線に対し角度信号を分配することなく、同期回転することができるレーダシステムを提供する。
【解決手段】 電波時計など、既設の無線放送波を利用して校正できる高精度な時計装置12aを設け、この時計装置12aの時刻信号に同期する同期回路3aを空中線9a毎に設ける。各レーダ装置の空中線毎に角度信号の伝送を行うことなく、複数空中線の同期回転装置を実現する。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 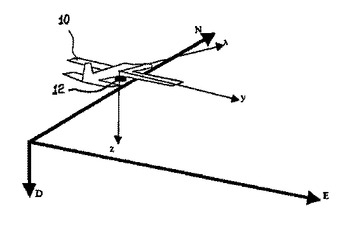 (もっと読む)
(もっと読む)
間隔測定方法及び装置
本発明は、特に自動車(1)に連行される間隔センサ(5)と物体(5)との間の間隔測定を、電磁パルス(6)の送信及び物体により反射される信号(7)の受信、及び信号伝搬時間の検出により行う方法と、この方法の実施に適した装置に関し、物体(2)における反射後受信される信号(10)が量子化され、加算され、続いて平均値が形成され、方法の実施形態において、受信されるパルスが、変調信号(18)に重ねられる。 (もっと読む)
101 - 110 / 111
[ Back to top ]