
国際特許分類[G01S15/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 音波の再放射を使用する方式,例.IFF,すなわち敵味方識別装置 (58)
国際特許分類[G01S15/74]に分類される特許
1 - 10 / 58
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
距離検出システム
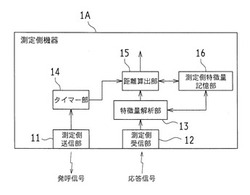
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
(もっと読む)
超音波放射に基づく位置検出

【課題】 対象物の位置を検出する。
【解決手段】 座標系に対する対象の配置を決定するための装置は該対象の周辺の電磁場を発生する少なくとも1つの電磁場発生器と該対象に固定される少なくとも1つの変換器とを含んでいる。該少なくとも1つの変換器は予め決められた振動周波数で振動しそれと該電磁場との相互作用に応じて、エネルギーを放射する。該変換器により放射される該エネルギーを検出しそれに応答して信号を発生するために該対象の周辺で1つ以上の検出器も使用される。
(もっと読む)
超音波距離測定システム
【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
超音波を用いた波浪計測方法および波浪計測システム
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に配置された海洋構造物1及びブイ3の海面下に設けられた第1,第2超音波送受信機2,4から海中に超音波を発信し、海面下に配置された3つの音波中継器5からの超音波を受信し、超音波の片道伝播時間に基づき音波中継器と両超音波送受信機との間の距離をそれぞれ検出すると共に両距離データの差を求め、この差にハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機の音波中継器に対する方位角及び俯角を係数とする両超音波送受信機間の相対変位ベクトルの三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成し、この三元一次連立方程式を解いて短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
海底音響映像システム
【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
波源推定装置及び波源推定方法
【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
水中作業管理装置
【課題】水中ポジショニングシステムを利用した水中作業において、潜水士に喚起する手段、例えば、警報や退避指示を水中ポジショニングシステムから直接送る伝達手段を提供する。
【解決手段】水中作業管理装置は、船11に設けた送受波器12から発射される超音波を、潜水士13が携帯するトランスポンダ14で受信し、該受信した信号に対応する超音波信号を発射し、該発射した超音波信号を前記船に設けた送受波器で受信することで、前記潜水士が携帯するトランスポンダの位置を測定する水中ポジショニングシステムであって、前記トランスポンダに、前記送受波器から発射される特定の超音波信号を受信するとバイブレートするバイブレーション機構16を備えたことである。
(もっと読む)
受信機システム、受信機システムの配置方法、および受信機システムを備える位置決めシステム
【課題】 位置決め用受信機システム、受信機システムの配置方法、および受信機システムを備える位置決めシステムを提供する。
【解決手段】 受信機システムは、測距信号を受信するための受信ノードから成るノード群を備え、ノード群の受信ノードは、予め定められた形態で配置され、ノード群が基準ノードを含み、ノード群内の他の受信ノードの位置を、予め定められた形態に関する情報と前記基準ノードの位置とに基づいて決定する。この受信機システムによれば、実用用途において遭遇される複雑な状況への適合性に優れた、従来よりも柔軟な構造とすることができる。同時に、複雑な適用状況下での較正の作業負荷も大幅に軽減される。
(もっと読む)
室内位置情報管理システム及び室内位置管理方法
【課題】
室内における位置計測対象の位置情報を管理することができ、室内に物理的な制約を設けずとも、室内を滞在可能な区域と不可能な区域とに分割することができ、かつ位置計測対象毎に侵入可否区域を設定することができる室内位置情報管理システム及び室内位置情報管理方法を提供することを目的とする。
【解決方法】
送信装置の位置情報と、位置計測対象毎に固有に設定された少なくとも3種類の区域を設定する許可区域情報とに基づいて、前記位置計測対象が該許可区域情報で許可されない区域に存在する場合には警告を通知し、前記少なくとも3種類の区域が、侵入禁止区域、通過可能区域及び滞在可能区域を含むことを特徴とする室内位置情報管理システム及び室内位置情報管理方法が提供される。
(もっと読む)
1 - 10 / 58
[ Back to top ]