
国際特許分類[G01S15/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | ソーナ方式の結合 (25)
国際特許分類[G01S15/87]に分類される特許
1 - 10 / 25
物体検出装置
【課題】複数の超音波物体検出部により障害物検出を行う場合の、検出タイミングのばらつきを抑制する。
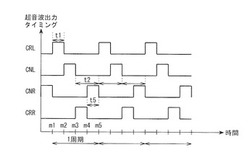
【解決手段】バンパ部11の長手方向の全域をカバーするように互いの間隔が略均等に配置された4つの超音波物体検出部CRL,CNL,CNR,CRRを駆動する際、左右何れか一端、例えば、左端の超音波物体検出部から中央に向かって順に駆動する。次に右端の超音波物体検出部から中央に向かって順に駆動する。つまり、超音波物体検出部CRL,CNL,CRR,CNRの順に駆動する。超音波物体検出部CNLおよびCNRはそれぞれ左端側から駆動した場合および右端側から駆動した場合の最後、つまり2番目に駆動されるため、走行車線の中央部付近の障害物検出は、超音波物体検出部CNLとCNRとにより、定周期で行われることになる。
(もっと読む)
3次元測位システム、ノード、ホスト、およびその動作方法

【課題】 複数のノードおよび1つのホストを備える3次元(3D)測位システムを提供する。
【解決手段】 ノードは、ノードがオブジェクトモードである場合、超音波レンジング技術に従って超音波を送信し、ノードがビーコンモードである場合、超音波レンジング技術に従って、ノードと、現在測定すべきオブジェクトノードとの間の距離を、ホストに提供すべき測定距離として測定するように構成される。ホストは、ビーコンモードのノードの数が所定の数以上である場合、ビーコンモードのノードによって報告される距離、およびビーコンモードのノードの位置に基づいて、オブジェクトモードのノードの位置を算出するように構成される。ノードは、その運動状態に従ってオブジェクトモードとビーコンモードとの間で自動的に切り替わる。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 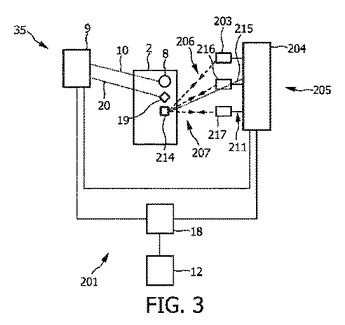 (もっと読む)
(もっと読む)
障害物検知装置
【課題】隣り合う2つの超音波ソナーの双方で障害物検知が行えるエリアを広げ、広範囲で障害物の位置特定が行えるようにする。
【解決手段】超音波ソナー2a、2bのいずれか一方を送受信モードにすると共に他方を受信モードとし、かつ、受信モードに設定する方に関しては受信感度を高めるようにする。これにより、隣り合う2つの超音波ソナー2a、2bの双方で障害物検知が行えるエリアD2を広げることが可能となり、広範囲で障害物の位置特定を行うことが可能となる。
(もっと読む)
障害物検知システム及びこのシステムの障害物センサ診断方法
【課題】障害物検知システムに用いられる障害物センサの異常を容易に検出できるようにする。
【解決手段】各障害物センサのそれぞれについて、送信部21から送信され、受信部22に直接廻り込む超音波信号23の検出有無を判断し、検出有の障害物センサを正常センサとして認識し、検出無しの障害物センサを異常センサとして認識する。
(もっと読む)
音源の推定方法とその装置
【課題】突発的な音や間欠的な音が発生した場合でも、音源の推定を確実に行うことのできる方法とその装置を提供する。
【解決手段】複数のマイクロフォンとカメラとを一体化した音・映像採取ユニットを用いて音と映像とを同時に採取した後、音圧波形データと画像データとをバッファに一時保存しておき、時刻t0にて、制御ユニットから測定開始信号の指令が発せられたときには、時刻t0から所定の遡行時間長Tz分だけ遡った時刻t1=t0−Tzと時刻t2=t0+(Tw−Tz)との間にバッファに保存されたデータを取出して音ファイルと動画ファイルとを作成してメモリーに保存し、この保存された音ファイルの音圧波形データを用いて、複数のマイクロフォンで採取した音の音圧信号間の位相差を算出して音源方向を推定するようにした。
(もっと読む)
車両用周辺監視装置
【課題】データの送信回数を少なくすることで通信の負荷を軽減し、短時間で障害物の検知・報知処理を行うことが可能な車両用周辺監視装置を提供する。
【解決手段】車両の前後に各4個ずつ設けられ、各設置位置に応じた識別IDを記憶すると共に、超音波を送受信し、障害物からの反射波に基づいて障害物までの距離を導出する超音波センサ11〜18と、超音波センサ11〜18へ動作指示信号を送信し、更に超音波センサ11〜18から距離情報を取得して、それに応じて警報を発する制御装置2とを備え、動作指示信号は、複数の超音波センサ11〜18の識別IDからなる識別ID情報と、複数の超音波センサ11〜18に対して指示する動作内容を示す動作モード情報とを含み、超音波センサ11〜18は動作指示信号に含まれる識別ID情報と自己の識別IDとが一致する場合に動作指示信号に含まれる動作モード情報に基づいて動作する。
(もっと読む)
音波撮像装置
【課題】海中での音波撮像装置において、海底堆積層が存在することによって生じる音波画像の位置のズレ・低いコントラスト(ぼやけ)・輪郭の歪み解消し、高精細・高解像度の音波画像を得る。
【解決手段】ソーナー送受信部300で受信した信号から底質計算部302で海底堆積層の物理パラメータを推定し、推定された物理パラメータから画像補償計算部304で堆積層の補正用データを生成する。補償画像処理部306は、この補正用データとソーナー受信信号307を用いて、堆積層の音波伝搬に起因する受信信号もしくは音波画像のズレや歪みが補正されたソーナー画像を生成する。さらに、対照情報生成部において、補正された音波画像と基準画像310を比較し、その残渣分をさらなる補正にフィードバックして補正の高精度化を行う。
(もっと読む)
1 - 10 / 25
[ Back to top ]