
国際特許分類[G01S17/46]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 電波以外の電磁波の反射を使用する方式 (1,005) | 物標の位置データを決定する方式 (889) | 位置データの間接的な決定 (134)
国際特許分類[G01S17/46]の下位に属する分類
国際特許分類[G01S17/46]に分類される特許
1 - 10 / 16
光学式位置検出装置
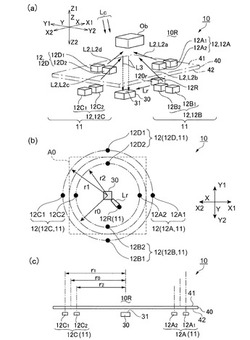
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置

【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
光学式検出装置、表示装置及び電子機器
【課題】広い範囲での対象物の位置検出が可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、照射方向に応じて強度が異なる第1の照射光を放射状に出射する第1の照射ユニットEU1と、照射方向に応じて強度が異なる第2の照射光を放射状に出射する第2の照射ユニットEU2と、第1の照射ユニットEU1からの第1の照射光が対象物に反射されることによる第1の反射光と、第2の照射ユニットEU2からの第2の照射光が対象物に反射されることによる第2の反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、対象物の位置を検出する検出部50を含む。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 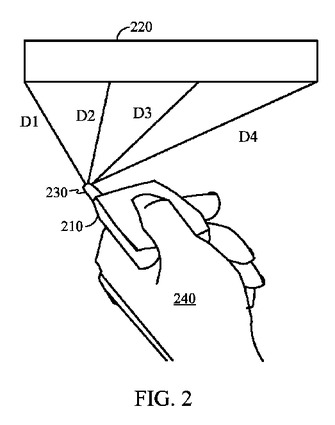 (もっと読む)
(もっと読む)
人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体
【課題】多数の空間領域を面状に演算処理する場合に、高いフレームレートでも演算量が膨大にならず、撮像範囲における人物動作の方向と距離の変化量を高精度に検出する。
【解決手段】TOF式距離画像センサ31からの距離情報に基づいて人物の動作情報を検出する高速人物動作検知制御手段4は、TOF式距離画像センサ31からの距離情報に基づいて時系列に複数の距離フレームを生成する距離フレーム生成部431と、少なくとも2つの距離フレームに基づいて、人物に距離変化のない距離情報である距離平衡フレーム(背景画像フレーム)を生成する距離平衡フレーム生成部432と、複数の距離フレームについてそれぞれ距離平衡フレームとのフレーム差分を演算し、フレーム差分から人物の動作情報として人物の距離の変化量と変化方向を算出するフレーム差分演算部46とを有している。
(もっと読む)
架空ケーブルの地上高測定装置
【課題】ケーブル状の細い被測定部でも簡単に地上高さを測定する。
【解決手段】略上方の所定の立体角の範囲で測長レーザー光を2次元走査して測長を行なうレーザーレーダと、該測長レーザー光の照射方向と鉛直方向の成す角度と、該測長の結果とに基づき前記範囲内における最低の鉛直高さを得るコンピュータと、該最低の鉛直高さを数値で表示する表示器と、を備えた。範囲内の2次元走査は1乃至数秒以内で行なえることが望ましい。走査後に、最低値が得られたレーザー照射方向に固定して照射を行い、ケーブルに当たったレーザー光を目視で確認できるようにしても良く、或いは範囲内の各所での測定結果を被測定物の形状や位置が認識できるようにグラフィカル表示してもよい。
(もっと読む)
1 - 10 / 16
[ Back to top ]