
国際特許分類[G01S17/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778)
国際特許分類[G01S17/88]の下位に属する分類
マッピングまたはイメージング用のもの (277)
衝突防止目的のもの (282)
気象用のもの (39)
国際特許分類[G01S17/88]に分類される特許
1 - 10 / 180
地中変位測定装置
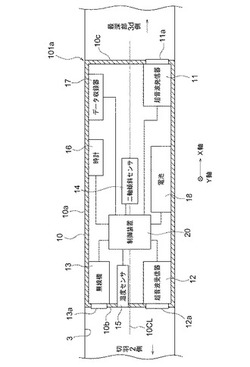
【課題】測定範囲の制限を受けることなく地中の土の変位を測定することを可能にする地中変位測定装置を提供することを課題とする。
【解決手段】地中変位測定装置101は、ボアホール3内に互いに間隔をあけて設置される複数のセンサ装置101aを備える。センサ装置101aは、超音波を発信する超音波発信器11と、超音波を検知する超音波受信器12と、制御装置20とを有している。さらに、センサ装置101aの制御装置20は、センサ装置101a及び別のセンサ装置101aの間で別のセンサ装置101aの超音波発信器11が超音波を発信してからセンサ装置101aの超音波受信器12が超音波を検知するまでの伝播時間を検出する伝播時間検出手段として作用し、検出した超音波の伝播時間及び超音波の伝播速度に基づき別のセンサ装置101aに対するセンサ装置101aの変位を算出する変位算出手段として作用する。
(もっと読む)
滞留度検出装置及び乗客コンベア

【課題】利用者の足元を見ることで倒れを検知する装置を用いて、利用者の人数(占有率)と歩行速度に基づいて乗降口付近での滞留度を検出する滞留度検出装置、及び、乗客コンベアを得る。
【解決手段】人が滞留していることを検出する走査範囲である検知エリアに水平面状にレーザビームを放射するスキャン型距離センサ7を備え、スキャン型距離センサ7は、乗客の足元を見るように設置され、測定した角度毎の距離を蓄積し、スキャン型距離センサで捉えた検知エリア内のデータから人数と、足の静止時間により算出した歩行速度に基づいて警報や停止等の制御指令を出す。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
目標検出装置、目標検出方法、目標検出プログラム
【課題】処理に負担がかからず、目標を確実に検出できるようにした目標検出装置を提供する。
【解決手段】LADARセンサ101は、画素毎に距離情報を取得する。LADARセンサ101から取得された隣接画素の距離差を演算し、隣接画素間の距離が急激に変化している部分を検出して物体を判定する。この判定された物体と、目標形状テンプレートとを比較して、目標物体の検出を行う。目標形状テンプレートは実寸の情報であり、LADARセンサ101からの距離情報を基に、目標形状テンプレートの実寸の情報を画素数の情報に換算し、判定された物体の画素数と、換算された目標形状テンプレートの画素数とを比較して目標物体の検出を行う。
(もっと読む)
窃盗防止装置並びに不正な干渉及び侵入の認識方法
【課題】販売員の防護領域への進入、退出並びに通常の店舗業務を許可する一方、窃盗を阻止する。
【解決手段】通路領域106以外の箇所で干渉又は乗り越えが可能であるような仕切り102により囲まれた防護領域104、特にレジの領域又は販売領域への不正な干渉又は侵入を認識するための窃盗防止装置108、110であって、該装置108、110はレーザスキャナ108を含み、該レーザスキャナ108は、その監視平面114により仕切り102越しの干渉及び乗り越えが認識されるようにその配置及び方向が決められ、その干渉又は乗り越えの認識に基づいて窃盗信号を出力する、という構成の装置において、通路領域106のための認証ユニット110を備え、該認証ユニット110は、通路領域106において正当に認められた通行があった場合にレーザスキャナ108を動作状態又は停止状態にするように構成されている。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
1 - 10 / 180
[ Back to top ]