
国際特許分類[G01S19/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | タイムスタンプメッセージを送信する衛星電波ビーコン測位システム,例.GPS [Global Positioning System], GLONASS[Global Orbiting Navigation Satellite System] or GALILEO (817) | 受信機 (636) | 特定の応用に特に適合した受信機 (132)
国際特許分類[G01S19/14]の下位に属する分類
航空機着陸システム用 (5)
盗難誘拐対策用 (9)
緊急時用 (5)
軍事用 (1)
スポーツ用 (4)
国際特許分類[G01S19/14]に分類される特許
81 - 90 / 108
測位端末及びサーバ
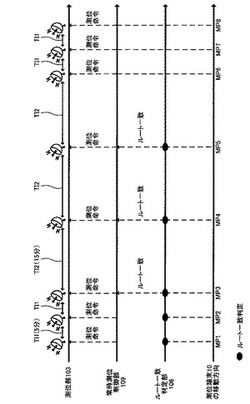
【課題】測位端末が定期的に測位処理を行い、測位処理によって取得された位置情報を情報提供サーバに送信する常時測位システムにおいて、測位端末の消費電力の増大を防止する。
【解決手段】本発明の測位端末は、測位端末の現在位置を示す位置情報を取得する測位処理を行う測位部103と、測位部103によって過去に取得された位置情報が示す位置ポイントを連接して構成される登録ルートを記憶するルート記憶部と、測位端末10が前記登録ルート上を移動するか否かを判定するルート一致判定部106と、前記測位端末が前記登録ルート上を移動すると判定された場合、測位部103が測位処理を行う測位間隔を、時間間隔TI1から時間間隔TI1よりも長い時間間隔TI2に変更する常時測位制御部109と、を具備する。
(もっと読む)
画像形成装置

【課題】目的地の設定が容易であり、必要としている経路情報を簡単に取得できる画像形成装置を提供する。
【解決手段】画像形成装置は、ネットワークを介して、経路情報提供サーバーに接続される、画像形成装置であって、撮像をした位置情報に関連づけられた画像データを取得する、画像データ取得手段と、取得した前記画像データに関連づけられている位置を目的地とする、目的地特定手段と、予め登録されている出発地の位置を出発地とする、出発地特定手段と、前記出発地から、前記目的地までの経路に関する情報を含む経路情報画像を、ネットワークを介して前記経路情報提供サーバーから取得する、経路情報画像取得手段と、前記画像データに基づく画像を前記経路情報画像に重ね合わせて合成し、合成経路情報画像を生成する、合成手段と、生成された前記合成経路情報画像を印刷する、印刷手段と、を備えて構成されている。
(もっと読む)
測位時間間隔制御装置及び測位時間間隔制御方法
【課題】移動状態及び/又は移動速度に応じて、測位すべき時間間隔及び位置を通知すべき時間間隔を変更すること。
【解決手段】位置を測定する時間間隔を制御する測位時間間隔制御装置は、移動端末装置の移動状態と、移動速度とを取得する取得部と、該取得部により取得された移動端末装置の移動状態と、移動速度とに基づいて、移動端末装置の位置を測定すべき時間間隔、及び該測定により得られた位置情報を出力すべき時間間隔を設定する測位時間間隔設定部とを有する。測位時間間隔設定部は、移動端末装置の移動状態及び/又は移動速度が変化した場合に、前記時間間隔を変更し、移動端末装置は、測位時間間隔設定部により設定された時間間隔で、移動端末装置の位置情報を取得し、該位置情報を出力する。
(もっと読む)
方位測定装置及び方位測定方法
【課題】物体が向いている方位を高い精度で正確に計測可能で、簡便かつ小型の方位測定装置を提供する。
【解決手段】位置情報を測定するGPSセンサ11、GPSセンサ11を長手方向に直線的に移動させるレール12を備え、計算機13がGPSセンサ11の移動前後で測定した2つの位置情報からGPSセンサ11の移動方向の方位を算出することで、レール12の長手方向の方位を簡便かつ高い精度で計測することが可能となる。また、レール12の先端にGPSセンサ11を取り付け、レール12を伸縮可能とすることで、方位測定装置の小型化を図ることができる。
(もっと読む)
周波数間バイアス推定装置及び周波数間バイアス推定方法
【課題】昼間と夜間との電離層の状態の違いを考慮してより正確な推定を可能とする周波数間バイアス推定装置及び周波数間バイアス推定方法を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する周波数間バイアス推定装置32であって、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部34と、夜間に観測された衛星信号の観測値と総電子数モデル値とに基づいて第1受信機依存周波数間バイアスを推定する夜間観測データ処理部36と、昼間に観測された衛星信号の観測値と総電子数モデル値と第1受信機依存周波数間バイアスとに基づいて衛星依存周波数間バイアス補正量を算出するとともに、衛星依存周波数間バイアス補正量に基づいて第1衛星依存周波数間バイアスを推定する昼間観測データ処理部37とを備える。
(もっと読む)
海面変位計測システム
【課題】基準局の位置が地震で変動しても、RTK法による計測データの連続性を保ち、地震による津波を支障なく検出できる海面変位計測システムを提供する。
【解決手段】第1観測局11での計測データと、観測施設20に設置の第1基準局21での計測データとに基づきRTK法で第1観測局11での海面位置の変動を計測する海面変位計測システム1であって、観測施設20に第2観測局22が設置され、観測施設20とは異なる基準施設30に設置された第2基準局32を基準にRTK法で第2観測局22の位置データを計測し、海面位置データから潮位データを抽出する潮位抽出部43と、潮位データから潮位偏差を算出する潮位偏差演算部46と、潮位偏差と第2観測局22の位置データの各変動に基づき第2観測局22の位置の異常を判断する異常判断部59と、異常判断部59での異常時に海面位置データを補正するデータ補正部42とを具備させたものである。
(もっと読む)
作業車両または農業用車両における器具の定位のためのシステムおよび方法
車両上の器具の定位を決定するためのシステムが提供される。本システムは、車両に取り付けられたカメラと、器具に取り付けられた、カメラの視野内の対象物を含む。対象物は、カメラに対して器具の定位の決定を可能にするマーキングを含む。車両上で器具の定位を決定する方法が提供される。器具定位システムが提供される。器具定位システムを設置する方法が提供される。コンピュータで実行可能な命令を内部に記憶したコンピュータ可読媒体が提供される。コンピュータで実行可能な命令は、実行時に器具の定位を決定する方法をプロセッサに実行させる。 (もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】3次元の高さ方向及び水平方向の電離層電子密度分布をより正確に推定し、衛星で観測できない空間部分の推定も可能とする電子密度推定装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する電子密度推定装置であって、1以上の受信機の各々から複数の測位衛星の各々に対する擬似距離およびキャリア位相擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し、当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、総電子数算出部により算出された総電子数に基づいて3次元電子密度推定空間設定部36により分割された領域毎の電子密度を推定する暫定電子密度推定部38と、推定された電子密度に基づいて、同じ高さの電子密度を抽出し、球面調和関数を用いて高さ毎の電子密度分布を近似して推定する3次元電子密度推定部39とを備える。
(もっと読む)
タイム・ゾーンおよびDSTへの関与の決定
デバイスのためのローカル・タイム・ゾーン設定が、位置と日付および時刻とに基づいて自動的に提供される。地理的なエリア内でのデバイスの現在の位置に関する位置情報と日付および時刻とが得られる。関連づけが、現在の位置と、地理学的なエリアのうちの地政学的な区域との間で確立され、地政学的な区域は、タイム・ゾーン適用ルールを含む。ローカル・タイム・ゾーン設定が、デイライト・セービング・タイム(DST)への関与を含み得るタイム・ゾーン適用ルールと現在の日付および時刻とに基づいて自動的に提供される。 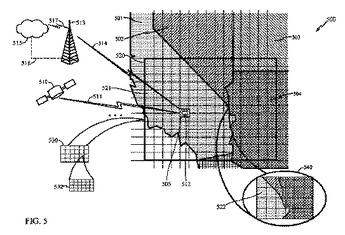 (もっと読む)
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
81 - 90 / 108
[ Back to top ]