
国際特許分類[G01S19/20]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | タイムスタンプメッセージを送信する衛星電波ビーコン測位システム,例.GPS [Global Positioning System], GLONASS[Global Orbiting Navigation Satellite System] or GALILEO (817) | 受信機 (636) | 宇宙セグメントのインテグリティモニタリング,宇宙セグメントの障害検知もしくは障害分離 (10)
国際特許分類[G01S19/20]に分類される特許
1 - 10 / 10
バイアスがかかった測定値に基づいた衛星航法システムの誤り検出
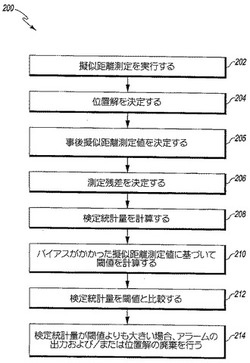
【課題】本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
(もっと読む)
航法計算システム

【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
擬似的距離測定値の選定による位置推定の修正方法
【課題】擬似的距離測定値の選定による位置推定の修正方法を提供する。
【解決手段】改善された位置Xhuberが、ナビゲーション受信機とN基の衛星との間の測定距離に相当する、擬似的距離ρiのN個の測定値(102)、及び前記受信機によってなされた前記受信機の位置の推定値Xprim(103)を用いて、ロバスト推定アルゴリズムの適用(104)により決定される。測定値ρiからの擬似的距離の剰余Δρihuberよりのノルム剰余値Δrihuberを決定するステップと、N−k個のノルム剰余値Δrihuberを含むシグマ(ギリシア文字σの大文字)個の部分集合(105、106)を決定するステップ(111)と、最小の標準偏差σSEOを伴う部分集合SEOを選定するステップと、異常でない測定値を選定するステップ(107)と、選定された測定値からの位置の修正された推定値Xclnを決定するステップとを含む。
(もっと読む)
局所的航法衛星システム又は全地球的航法衛星システムにおけるロバストで改善された空間信号の正確性パラメータの演算
【課題】古典的なアプローチより良好に同時に実行するロバスト検知において、空間信号の正確性パラメータの演算を提供する。
【解決手段】個々の空間信号の誤差ベクトルを測定するステップ(S10)と、個々の空間信号の誤差ベクトルをサービスエリアにマッピングするステップ(S12)と、経験的なサンプルセットを集積するステップ(S14)と、集積されたサンプルセットの推定の密度関数を処理するステップ(S16)と、ガリレオのオーバーバウンド検知において、又は、過剰質量を有する対のオーバーバウンドの検知において、密度関数を個々にオーバーバウンドするステップ(S18)と、既定された要件による最も悪い場合を選択するステップ(S20)と、の少なくとも1つを備える。
(もっと読む)
衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラム
【課題】観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く衛星測位システムの異常値を検出する。
【解決手段】異常値指標算出部11は、衛星測位システムの各人工衛星と受信機との間の擬似距離などの時系列データの各時刻における異常値指標を算出する。動的モデル構成部12は、一定期間において異常値指標から動的にモデルを構成し、その動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。異常値検出部13は、変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標を異常値として検出する。
(もっと読む)
過剰遅延勾配を監視する地上システムおよび方法
【課題】衛星信号の水平遅延勾配を監視する処理機能部を提供すること。
【解決手段】処理機能部は、衛星差分モジュール、二重差分モジュール、および勾配推定器モジュールを含む。衛星差分モジュールは、互いに既知の幾何学的関係を有する少なくとも2つの基準受信機から、少なくとも2つの衛星の搬送波位相測定値を受け取る。衛星は、被監視衛星および少なくとも1つの他の衛星を含む。衛星差分モジュールは、被監視衛星からの信号と少なくとも1つの他の衛星からの信号との搬送波位相測定値の差分を決定する。二重差分モジュールは、少なくとも2つの基準受信機の対の間の二重差分を形成し、対の間の二重差分を基準受信機の既知の位置の差で補償し、二重差分を平均化する。勾配推定器モジュールは、被監視衛星に関する平均化された補償二重差分に基づいて水平遅延勾配の大きさを推定する。
(もっと読む)
マルチコンステレーション全地球航法衛星システム補強及び支援
マルチコンステレーションGNSS補強及び支援システムは、複数の基準局を含むことができる。各基準局は、ナビゲーションデータを複数の異なる全地球航法衛星システムから受信し、そして各異なる全地球航法衛星システムに関するインテグリティデータ及び性能データを監視するように適合させることができる。オペレーションセンターは、前記複数の基準局の各基準局から送信される前記インテグリティデータ及び性能データを受信することができる。通信ネットワークは、前記オペレーションセンターからのメッセージを、ユーザのnavcom機器に送信して前記navcom機器を補強し、そして支援することができる。 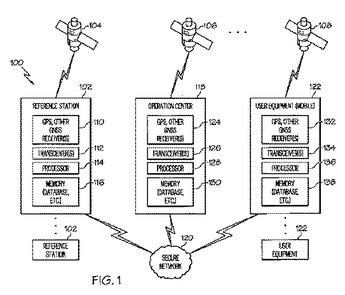 (もっと読む)
(もっと読む)
測位システムの衛星配列の監視システム
本発明は、衛星(S1)により地球(T)へ向かって発せられる測位信号を受信できるように衛星配列(2)の衛星(S1)の高度より低い高度で軌道(O2)内に配列される少なくとも1つの監視衛星(S2)を備え、かつ上記受信される測位信号の完全性を上記信号からその目的で分離されている位置情報を用いて検証するように意図された処理ユニット(11)を備える監視システム(1)に関する。 (もっと読む)
各種の制御不可能な系統効果により干渉を受ける時間変化信号値の予測誤差を修正する方法
本発明は、時間変化信号の値、特に、全地球航法衛星システムから送られた航法メッセージの予測値を修正する方法に関し、受信した信号に含まれていて時間変化するパラメータの予測値を修正する以下のステップ、すなわち
−所定の時間にわたり推定された第1の値のバッチに基づいて、これらの値を同一の所定時間にわたり先に予測された値と比較することにより、予測誤差を推定するステップと、
−前記信号を処理して、前記系統効果の寄与分を分離する方法により、予測された時系列的な一連の予測誤差を解析するステップと、
−対象とする期間にわたる前記系統効果の寄与分の挙動を外挿すると共に、正しく外挿された値を用いて予測値を修正するステップとを含むことを特徴とする。 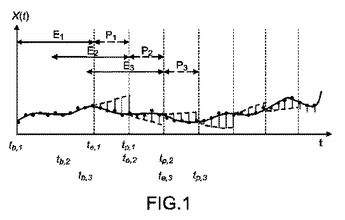 (もっと読む)
(もっと読む)
異常な擬似距離測定値から無線ナビゲーション受信機ユーザを保護するための方法
本発明は、異常な擬似距離測定値に対して無線ナビゲーション受信機ユーザを保護するための方法に関する。この方法は、測定値の残差を計算することに基づいた統計的推定スキームによって測定誤差が検出されることを特徴とする。
この方法は、特に、任意の地上部分の自律した方法で(したがって、RAIM機能を実行して)、どんな完全性機能もない既製の受信機(「基本的」と呼ばれる)の性能を向上させることと、堅固な統計的推定アルゴリズム、すなわち測定誤差によって全く影響されないアルゴリズムの使用、および動的基準の実行を通じて、位置の計算への入力における測定値を損なう起こり得る誤差を検出することと、かかる誤差が検出された場合には、それを除外することによって、基本的受信機により提供される位置のための堅固な補正を計算することと、を可能にする。
(もっと読む)
1 - 10 / 10
[ Back to top ]