
国際特許分類[G01S19/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226)
国際特許分類[G01S19/42]の下位に属する分類
キャリア位相測定を用いるもの,例.キネマティック測位;長基線または短基線干渉を用いるもの (22)
衛星電波ビーコン測位システムからの信号の測定を,補助的な測定と組み合わせるもの (57)
衛星電波ビーコン測位システムからの信号から引き出される位置解と,さらなるシステムからの位置解とを,切り替えまたは組み合わせるもの (92)
位置解が特定の曲線または表面上に制限されるもの,例.線路上を動く物体のための (10)
相対位置決定 (10)
国際特許分類[G01S19/42]に分類される特許
1 - 10 / 35
位置情報処理装置および位置情報処理方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
位置の確認
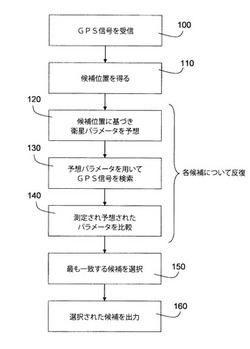
【課題】測位の計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することができる電子デバイスの位置の指標を決定する方法を提供する。
【解決手段】デバイスによって、衛星測位システムの1つまたは複数の衛星から送信された無線信号を受信し、無線信号に関する情報を得る。この情報から、信号が受信された時のデバイスの真の位置に関して、複数の仮定を得る。無線信号に関する情報と仮定との間の一致度を評価して、評価の結果に基づき、仮定のうちの1つまたは複数を選択する。選択された1つまたは複数の仮定の指標を出力する。
(もっと読む)
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム

【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
(もっと読む)
情報処理装置、情報処理方法、並びにプログラム
【課題】精度を向上させた位置情報の記憶を行う。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
(もっと読む)
端末装置
【課題】従来、端末装置が存在する領域を精度高く判断できなかった。
【解決手段】自身が存在する領域が第一領域であるか、第一領域とは異なる第二領域であるかを判断する端末装置であって、1または2以上の各測位衛星から信号を受信する信号受信部と、前記信号受信部が受信した2以上の信号を代表する値である代表値を算出する代表値算出部と、前記信号受信部が受信した2以上の信号の分散具合を示す値である分散具合値を算出する分散具合値算出部と、前記代表値および前記分散具合値を用いて、端末装置が第一領域に存在するか、第二領域に存在するかを判断し、判断結果を取得する判断部と、前記判断部が取得した判断結果を出力する出力部とを具備する端末装置により、端末装置が存在する領域を精度高く判断できる。
(もっと読む)
移動体端末装置及びその制御方法、並びに移動体端末装置を制御するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】移動体端末装置の現在位置の測位に関し、対象となる施設の領域内外で測位周期を異なるよう制御する装置及びその方法を提供する。
【解決手段】移動体端末の現在位置を測位する測位ステップと、該測位ステップが該現在位置を測位する周期を制御する測位周期制御ステップと、該測位周期の制御対象となる施設の領域を特定する施設領域特定ステップと、該測位ステップ及び該施設領域特定ステップを参照して、該現在位置が該施設領域内に存在するか否かを判定する第1の判定ステップと、を備え、該測位周期制御ステップは、該第1の判定結果に基づき、該現在位置が該施設領域内に存在すると判定されるとき、予め定められた基準周期と異なる第1の周期で該現在位置を測位するよう該測位ステップを制御する。
(もっと読む)
支援計算を伴う衛星測位
【課題】衛星信号サンプルからポジションフィックスを計算する。
【解決手段】サンプルの第1の組から第1のポジションフィックスを計算する。第1のポジションフィックスの計算中に生成される第1の基準情報をメモリに記憶する。サンプルの第2の組から第2のポジションフィックスを計算する。第2のポジションフィックスの計算中に生成される第2の基準情報をメモリに記憶する。第3の時間に受信器により発生される衛星信号サンプルの組、または、そのような衛星信号サンプルの組から得られる距離測定値を受信し、第3のポジションフィックスを計算するためにサンプルの組または距離測定値を処理する。処理は、第1および第2のポジションフィックスの計算中に生成される基準情報によって支援される。
(もっと読む)
予測を伴うハイブリッド衛星測位
【課題】衛星測位を使用して2つのポジションフィックスを計算する。
【解決手段】RFフロントエンドを使用して、衛星測位信号を受信するステップと、アナログ・デジタル変換器を使用して、受信信号をサンプリングして信号サンプルを発生させるステップと、第1のポジションフィックスを計算するために、プロセッサを使用して、サンプルの第1の組が発生されるときにサンプルの第1の組を処理するステップと、計算と関連付けられる情報をメモリに記憶するステップと、第2のポジションフィックスを計算するためのその後の処理のために、サンプルの第2の組、または、サンプルの第2の組から得られる距離測定値をメモリに記憶するステップと、その後、第2のポジションフィックスを計算するためにサンプルの第2の組を処理し、第2のポジションフィックスの計算が第1のポジションフィックスの計算と関連付けられる情報によって支援されるステップとを備える。
(もっと読む)
位置測位システム
【課題】 2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することを目的とする。
【解決手段】GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させる、位置算出方法及び位置算出装置を提供する。
【解決手段】測位用信号の一種であるGPS衛星信号を受信する。そして、少なくともGPS受信機の位置の変動を確率変数とする確率分布モデルである状態変動正規分布モデルに基づいて定められた位置算出演算を行って、GPS受信機の位置を算出する。
(もっと読む)
1 - 10 / 35
[ Back to top ]