
国際特許分類[G01S19/43]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | キャリア位相測定を用いるもの,例.キネマティック測位;長基線または短基線干渉を用いるもの (22)
国際特許分類[G01S19/43]の下位に属する分類
国際特許分類[G01S19/43]に分類される特許
1 - 10 / 13
RTK測位計算に利用する衛星の選択方法及びその装置
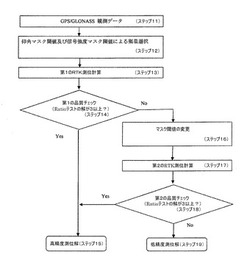
【課題】 RTK測位におけるリアルタイムの測位に使用出来るとともに、1日に高精度位置を利用出来る合計時間(利用率)の向上を図ること
【解決手段】 仰角マスク又は信号強度マスクの何れか一方のマスク閾値について初期設定したマスク閾値とは異なる別のマスク閾値を設定し、初期設定したマスク閾値を介して選択した衛星からの信号に基づいてRTK測位計算を行い、この測位解の品質チェックを行い、判定結果が良い場合にはこの測位解を高精度測位解とし、判定結果が悪い場合には別のマスク閾値を設定したマスク閾値を初期値から別のマスク閾値に変更し、この別のマスク閾値を介して新たに選択した衛星からの信号に基づいてRTK測位計算を行い、この測位解の品質チェックを行い、判定結果が良い場合にはこの測位解を高精度測位解とする。品質チェックは、Ratioテストにより行い、利用可能な衛星信号として、GPSに加えてGLONASSからの信号を自動的に選択可能とする。
(もっと読む)
GPS装置を位置決めするシステムおよび方法

【課題】GPS装置の正しい位置を、予め定められた選択すべき位置のセットから決定するシステムと方法を提供する。
【解決手段】目視可能なGPS衛星1および予め定められた代替え位置の既知位置に基づいて、各衛星と各位置との間の理論的距離および/またはその距離の差を決定する。これらの距離は、予め定められた代替え位置のなかから正しい位置を選択するための、GPS装置5のアンテナ3と各GPS衛星の間の距離6の測定値に関連がある。貨物置場における予め定められたコンテナスロットを識別するシステムおよび方法も開示される。
(もっと読む)
海面における中周期波の計測方法および計測装置
【課題】GPS単独測位方式を用いた場合でも中周期波を精度良く計測し得る海面における中周期波の計測方法を提供する。
【解決手段】海面に係留された浮体Fに設けられたGPS受信機31にて観測される搬送波位相を用いた精密変動観測法(PVD法)により、浮体の変動量を検出して海面の中周期波を計測する際に、GPS受信機の距離計測部で求められた搬送波位相距離に含まれているGPS衛星の時計誤差、電離層遅延量および対流圏遅延量を精密に算出し、そしてこれらの誤差成分を上記求められた搬送波位相距離から除去した後、バンドパスフィルタをかけることにより、上記搬送波位相距離から30秒〜2分までの中周期変動成分を抽出する方法である。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
油圧ショベルの較正装置及び油圧ショベルの較正方法
【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正装置及び較正方法を提供する。
【解決手段】油圧ショベルの較正装置は、入力部63と、第1較正演算部65cと、第2較正演算部65dと、を備える。入力部63は、作業点位置情報とアンテナ位置情報とが入力される部分である。作業点位置情報は、外部計測装置で計測された作業点の複数の位置での座標を示す。アンテナ位置情報は、外部計測装置で計測されたアンテナの位置の座標を示す。第1較正演算部65cは、入力部63に入力された作業点位置情報に基づいて、数値解析により作業機パラメータの較正値を演算する。第2較正演算部65dは、入力部63に入力されたアンテナ位置情報に基づいてアンテナパラメータを較正する。
(もっと読む)
GNSS解析システム、GNSS解析装置、及びGNSS解析プログラム
【課題】キネマティック方式とスタティック方式の両者の特徴を活かした基線解析を現場で実施可能な基準局を提供する。
【解決手段】基準局2は、GNSS受信部24と、無線受信部25と、データ処理部41と、時系列取得部40と、を備えている。GNSS受信部24は、GNSS衛星からの電波を受信して自局観測データを取得する。無線受信部25は、GNSS衛星からの電波を受信した計測局3から出力された観測データである他局観測データを取得する。データ処理部41は、所定の繰り返し時間内に取得された自局観測データ及び他局観測データを処理して測位結果を得る。時系列取得部40は、データ処理ステップを、前記繰り返し周期ごとに繰り返し実行して、測位結果の時系列を取得する。そして、時系列取得部40は、繰り返し時間を異ならせた複数の時系列を取得している。
(もっと読む)
ヒーブ量計測装置
【課題】
従来は、ヒーブ量を計測する場合には、必ず4個以上の測位用衛星の受信が必要であったため、例えば受信が中断し、受信中の測位用衛星が3個以下になった場合に、ヒーブ量計測も中断してしまうという問題があった。
【解決手段】
位置を特定できる3個以上の測位用衛星から送信された電波を受信して、当該電波に重畳されているコードの位相から受信点の位置を求める測位手段と、観測周期における前記電波のキャリア位相量を観測する手段と、前記観測によるキャリア位相量をフィルタしヒーブ量に起因するキャリア位相量であるところのヒーブ位相量を求める手段と、前記受信点の位置と衛星の位置および前記ヒーブ位相量からヒーブ量を算出する手段と、を備えたヒーブ量計測装置とする。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
監視局、制御方法、広域補強システム、および制御プログラム
【課題】 広域補強システムを構成する監視局を、移動する物体に設置することが可能な監視局、制御方法、広域補強システム、および制御プログラムを提供する。
【解決手段】 広域補強システムの監視局は、自監視局の位置を検出し、位置情報として出力する検出手段と、入力された前記位置情報を送信する送信手段とを備える。
(もっと読む)
海面変位計測システム
【課題】基準局の位置が地震で変動しても、RTK法による計測データの連続性を保ち、地震による津波を支障なく検出できる海面変位計測システムを提供する。
【解決手段】第1観測局11での計測データと、観測施設20に設置の第1基準局21での計測データとに基づきRTK法で第1観測局11での海面位置の変動を計測する海面変位計測システム1であって、観測施設20に第2観測局22が設置され、観測施設20とは異なる基準施設30に設置された第2基準局32を基準にRTK法で第2観測局22の位置データを計測し、海面位置データから潮位データを抽出する潮位抽出部43と、潮位データから潮位偏差を算出する潮位偏差演算部46と、潮位偏差と第2観測局22の位置データの各変動に基づき第2観測局22の位置の異常を判断する異常判断部59と、異常判断部59での異常時に海面位置データを補正するデータ補正部42とを具備させたものである。
(もっと読む)
1 - 10 / 13
[ Back to top ]