
国際特許分類[G01S19/44]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | キャリア位相測定を用いるもの,例.キネマティック測位;長基線または短基線干渉を用いるもの (22) | キャリア位相不確定の決定;フローティング・アンビギュイティ;LAMBDA[Least−squares AMBiguity Decorrelation Adjustment]法 (9)
国際特許分類[G01S19/44]に分類される特許
1 - 9 / 9
測位装置及びプログラム
【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
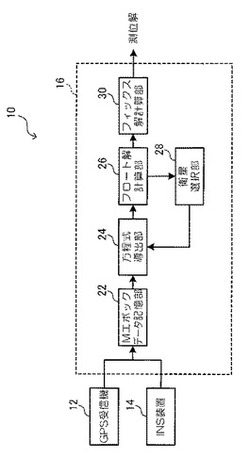
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法

【課題】 リアルタイムの高精度測位およびナビゲーションをより現実的なものにすること。
【解決手段】 本発明は、ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、別個に利用された際にRTKおよびWADGPSナビゲーション技術に付随する短所が回避される。本方法には、静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化することを含んでいる。その後で、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知の(分散が小さい)として扱われてWADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
衛星航法システムにおける電離圏異常を検出する方法及びその装置。
【課題】 1周波数のみの観測データを用い、基準局とモニタ局間の基線長に影響されない衛星航法システムにおける電離圏異常を検出する事。
【解決手段】 基準局とモニタ局で取得した衛星データの1周波数のみのコード疑似距離と搬送波位相の観測データの搬送波位相及び電離圏フリー線形結合の受信機間一重差を求め、SD電離圏遅延、SD搬送波位相バイアス、SD受信機時計誤差を状態変数とする全航法衛星を利用した観測方程式を構成し、状態変数を最小二乗原則でエポック毎に推定して観測方程式のフロート解を求め、SD搬送波位相バイアスをDDに変換し、整数不定性決定手法によりDD搬送波位相バイアスの整数解の候補を求め、この候補に対し検定を実行して観測方程式のフィックス解を求め、基準局とモニタ局間の推定したSD電離圏遅延、SD受信機時計誤差を修正し、最終的に得たSD電離圏遅延により電離圏異常を検出する。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
【課題】浮動バイアス値を短時間で決定する。
【解決手段】ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する。静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化する。その後、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知として扱われて、WADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
全地球的航法衛星システム受信機における異常測定値の検出および補正ならびにアンビギュイティの決定
全地球的航法システムはローバ内に配置された第1のナビゲーション受信機と、基地局内に配置された第2のナビゲーション受信機とを備える。2つの受信機において受信された衛星信号の測定値の一重位相差が算出され、観測モデルから導き出された一重位相差と比較される。ローバの出力位置を判定し、かつ、整数値アンビギュイティを決定するための計算に先立って、異常測定値が検出され、除去される。検出基準は算出されかつ導き出された一重位相差間の残余に基づく。整数値アンビギュイティを決定するために、コレスキー情報カルマンフィルタおよびハウスホルダー変換に基づいて行われる計算が好適に適用される。1つのエポックから別のエポックへの衛星の配座状態の変化が計算の中に含まれる。 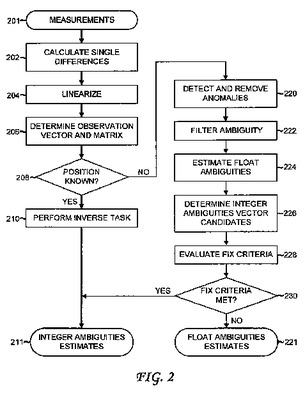 (もっと読む)
(もっと読む)
低コスト1周波GNSS受信機を使用するセンチメートル精度の測位方法
全地球測位システムは、視野内のGNSS衛星群に対応する位置及び搬送波位相測定値群を求める基地局GNSS受信機と、移動局GNSS受信機とを含み、移動局GNSS受信機は1周波受信機であり、この1周波受信機は、複数のGNSS衛星から1つの周波数帯で、捕捉窓の長さに亘って送信されるGNSS衛星信号を捕捉し、複数のGNSS衛星は、搬送波位相データセットを供給するために十分多くの衛星であり、搬送波位相データセットから、関連する搬送波位相整数アンビギュイティの解が多元決定される。システムはこれらの捕捉信号から、視野内のこれらの衛星、コード位相遅延群及び関連する位置不確定性に関連する探索空間を決定する。システムはこれらの搬送波位相整数アンビギュイティを、所定の閾値を上回る信号電力値に関連する搬送波位相二重差測定値群を使用して決定する。システムはこれらの搬送波位相整数アンビギュイティを、捕捉窓の長さに亘って唯一の解セットとして決定し、移動局GNSS受信機の位置を数センチメートル以内の精度で、決定された搬送波位相測定値群を使用して求める。  (もっと読む)
(もっと読む)
補助データを使用する衛星測位方法
【課題】補助データを使用する衛星測位方法
【解決手段】必ずしも多数の周波数を観察することなく、ユーザーの衛星測位受信機が位相のアンビギュイティを解決できるようにするために、基準ネットワーク(10、12、14)で行う測定により補助データを発生し、このデータをユーザーの受信機へ送る。使用する補助データは、キャリアコードのスライディング組み合わせ(Θeme)に関連するか、または送信機のクロック値を再構成するのに十分なデータに関連する送信機のクロック値から成ることが好ましい。搬送波コードのスライディング組み合わせ(Θeme)に関連する送信機のクロック値は、例えば電離圏の影響のない送信機のクロック値(heme)およびクロックバイアス(C’eme)から再構成できる。
(もっと読む)
キャリア位相の相対的な測位における送信時間の不確実性を解決すること
キャリア位相の相対的な測位処理を実行するために電子デバイスにおいて使用するための方法および装置が提供される。  (もっと読む)
(もっと読む)
ワイドレーンの組み合わせを使用する無線ナビゲーション信号の処理
【課題】GNSS受信機の助けにより、測位解の精度を高めることができるよう、無線ナビゲーション信号を処理すること
【解決手段】
少なくとも2つの異なる周波数で無線ナビゲーション信号を一斉送信する衛星からの無線ナビゲーション信号を処理するための方法は、
各衛星から前記信号を受信するステップと、
各衛星に対し、コードおよび位相の非微分測定を実現するステップ(10)と、
基準システムから受信した前記衛星に関連するワイドレーンのバイアスを使用することにより、前記衛星のグループでコヒーレントな態様で前記ワイドレーンなアンビギュイティを決定するステップ(12、13、14)と、
コードおよび位相測定値および前記コヒーレントなワイドレーンのアンビギュイティの測定値を助けにして、前記受信機の全地球測位をするステップ(16、18)とを備える。全地球測位ステップは、それぞれの衛生に対して前記ワイドレーンのアンビギュイティを補償した、コードの測定値と前記位相測定値の差の電離層のない状態での組み合わせにより、疑似的距離を決定するステップ(16)を備え、前記電離層のない状態での組み合わせは、ノイズに関して最適化される。疑似的距離は前記基準システムからの電離層のない状態での組み合わせに関連する衛星のクロック値を受信することによって決定される。
(もっと読む)
1 - 9 / 9
[ Back to top ]