
国際特許分類[G01S19/47]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | 衛星電波ビーコン測位システムからの信号の測定を,補助的な測定と組み合わせるもの (57) | 補助的な測定が慣性測定であるもの,例.Tightly coupled inertial (23)
国際特許分類[G01S19/47]に分類される特許
21 - 23 / 23
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
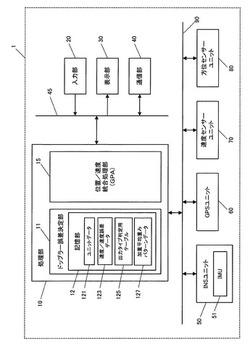
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 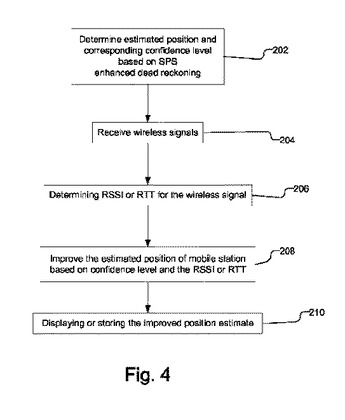 (もっと読む)
(もっと読む)
高度情報を使用してデジタル地図を更新する方法

本発明は、デジタル地図を更新し且つグローバルナビゲーション装置をデジタル地図に一致させる方法に関する。そのようなナビゲーション装置は、衛星(22、26)からのGPS信号(20、24)に依存する。1つの適切に記載されたナビゲーション装置における位置誤差の原因は、GPSマルチパスの現象により発生する。緯度/経度方向のGPSマルチパス誤差は、高度における誤差と密接に相互に関連付けられることが明らかになってきている。GPSプローブデータの高度値を高度に対する基準仕様と比較することにより、低信頼プローブデータ(異常値)が容易に識別及び選別される。また、そのような技術は、特定の道路区分への一致及び慣性誘導装置等の他の位置決め技術に戻らないかを確認するために、移動ナビゲーション装置により用いられる。ローカル高度が確実に認識されない場合には、収集されたプローブデータから推定値が直接導出される。 (もっと読む)
21 - 23 / 23
[ Back to top ]