
国際特許分類[G01S19/51]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | 相対位置決定 (10)
国際特許分類[G01S19/51]に分類される特許
1 - 10 / 10
移動基準局を利用した車両間相対位置制御方法及びそのシステム
【課題】車両間相対位置の正確度を改善し、位置制御できる移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供する。
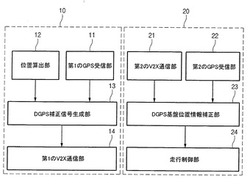
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
(もっと読む)
位置標定装置、車載器、位置標定方法、位置標定プログラム、運転支援方法、運転支援プログラム、道路課金方法、道路課金プログラム、位置標定システム、運転支援システムおよび道路課金システム

【課題】車両間で相対DGPSを行わなくても車両間の相対位置が得られるようにすることを目的とする。
【解決手段】測位信号受信部112は測位衛星102から測位信号を受信して観測量を算出する。自己位置標定部114は観測量を用いて概略位置の座標値を算出する。LEX信号受信部111は準天頂衛星からLEX信号を受信して地域別の測位補強情報を取得する。デコード部113は概略位置を含んだ地域の測位補強情報を選択して観測量の補正量を算出する。自己位置標定部114は観測量を補正し、補正した観測量を用いて標定座標値を算出する。V2V通信制御部115は標定座標値を他の車両103へ送信し、他の車両103の標定座標値を受信する。相対位置演算部116は自己の車両103と他の車両103の標定座標値に基づいて他の車両103の相対位置を算出し、算出した相対位置を運転制御支援装置104に出力する。
(もっと読む)
相対測位装置、および相対測位方法
【課題】端末間の相対位置を精度高く取得できなかった。
【解決手段】GPS信号受信部と、受信SNR等の自端末に関する情報である2以上の衛星ごとの自端末衛星情報群を有する自端末情報群を取得し、自端末情報群のうちの一部または全部の情報を送信し、受信SNR等の他端末に関する情報である2以上の衛星ごとの他端末衛星情報群を有する他端末情報群のうちの一部または全部の情報を受信し、2以上の衛星ごとの自端末衛星情報群のうちの1以上の情報、および2以上の衛星ごとの他端末衛星情報群のうちの1以上の情報を用いて、衛星ごとに相関性が高いか否かを判断する相関性判断部と、相関性が高いと判断された衛星の信号を用いて、相対位置を取得し、出力する相対測位装置により、相関性が高い衛星の情報を用いて、端末間の相対位置を精度高く取得できる。
(もっと読む)
ヒーブ量計測装置
【課題】
従来は、ヒーブ量を計測する場合には、必ず4個以上の測位用衛星の受信が必要であったため、例えば受信が中断し、受信中の測位用衛星が3個以下になった場合に、ヒーブ量計測も中断してしまうという問題があった。
【解決手段】
位置を特定できる3個以上の測位用衛星から送信された電波を受信して、当該電波に重畳されているコードの位相から受信点の位置を求める測位手段と、観測周期における前記電波のキャリア位相量を観測する手段と、前記観測によるキャリア位相量をフィルタしヒーブ量に起因するキャリア位相量であるところのヒーブ位相量を求める手段と、前記受信点の位置と衛星の位置および前記ヒーブ位相量からヒーブ量を算出する手段と、を備えたヒーブ量計測装置とする。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
衛星測位システムにおいて時間を決定するための方法および装置
【課題】衛星測位システムにおいて時間を決定するための方法および装置。
【解決手段】一つの実施態様において、基準時間は、他のナビゲーション情報を決定するのに使用される。そのようなナビゲーション情報は、例えば、衛星測位システム(SPS)の受信機のローカル/位置を含む。一つの実施態様において、SPSの受信機と1組の一つ以上の衛星との間の相対速度は、SPSの受信機により示されるような時間と基準時間との間のオフセットを決定するために使用される。他の実施態様に関して、誤り統計が、基準時間を決定するために使用される。他の実施態様に従って、衛星の少なくとも位置を各々代表する二つの記録が比較され、時間を決定する。一つの実行において、SPSの受信機は移動であり、前記方法の一つ又は組み合わせにより、基地局に関連して時間と/又は他のナビゲーション情報を決定するように動作する。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
衛星測位システム
【課題】移動端末が自局の位置を高精度で測位できる衛星測位システムを安価に実現する。
【解決手段】複数個の準天頂衛星201、301a〜301dを用いた衛星測位システムにおいて、複数個の準天頂衛星が一体として衛星軌道に向けて打ち上げられ、複数個の準天頂衛星が一体として衛星軌道に沿って安定に飛行する段階において、比較的に高い仰角に位置する複数個の準天頂衛星の内の1個を基準局201とし、残りの準天頂衛星を中継局301a〜301dとして基準局の周辺の所定の軌道に分散させて、基準局から送信される第1の測位信号と各中継局から送信する第2の測位信号とを同期させることによって、移動端末が自局の位置を高精度で測位できるようにした。
(もっと読む)
キャリア位相の相対的な測位における送信時間の不確実性を解決すること
キャリア位相の相対的な測位処理を実行するために電子デバイスにおいて使用するための方法および装置が提供される。  (もっと読む)
(もっと読む)
車両による通信を用いて車両の相対的位置を決定する方法
【課題】IEEE802.11に基づいた通信を利用して、第1と第2の車両の相対的位置を決定する方法を提供する。
【解決手段】 本発明の方法において、第1車両が、(a)第2車両からIEEE802.11に基づいた通信を受領するステップと、(b)前記受領した通信に基づいて、前記第2車両の、前記第1車両に対する相対的位置を決定するステップとを実行する。
(もっと読む)
1 - 10 / 10
[ Back to top ]