
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
1,061 - 1,070 / 1,802
測位携帯端末、携帯端末の位置特定方法、携帯端末の位置特定システム及び携帯端末を利用したセキュリティシステム

【課題】 非同期基地局を備える無線通信システムにおいて、携帯端末の位置を特定する。
【解決手段】 非同期基地局はGPS受信器を備え、GPS衛星からのGPS信号に基づきGPS時刻を取得する。基地局は定期的にビーコン信号を送出する。ビーコン信号には取得したGPS時刻と、直近のGPS時刻からビーコン信号を送出するまでの時間遅れと、基地局のID番号と、基地局位置情報との情報がのせられる。ビーコン信号を受信した携帯端末は、ビーコン信号を受信した受信時刻と、ビーコン信号から取得した直近のGPS時刻と、直近のGPS時刻からこのビーコン信号を送出するまでの時間遅れとからビーコン信号の伝搬時間を算出する。伝搬時間の差し引きを行うことで、各基地局からの伝搬時間の差分を算出する。算出した伝搬時間の差分と基地局位置情報とから携帯端末の位置を算出するようにした。
(もっと読む)
経路損失ポリゴンによる測位
本発明は測位支援データの準備する方法およびデバイス、並びにこの支援データに基づき位置決定を実行する方法、デバイスおよびシステムを提供する。測位支援データはエリア定義を含み、少なくとも各々の量子化経路損失測定値指標ベクトルに関係する。また、好ましくは、ベクトルは種々のセル間の相対的な無線状態および/または伝送モードに依存する。  (もっと読む)
(もっと読む)
情報処理装置および表示言語設定方法

【課題】位置情報から表示言語を自動的に設定することで、全世界共通の情報処理装置を提供することを目的とする。
【解決手段】本発明の情報処理装置は、位置検出手段1と、位置情報に基づいて表示に使用する言語を判定する表示言語判定手段2と、判定された言語を設定する表示言語設定手段3を備え、位置情報をもとに表示言語を自動的に設定することで、出荷前に仕向け地別に表示言語をあらかじめカスタマイズしておく必要がなくなる。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことが可能な自車位置判定装置を提供する。
【解決手段】自車位置計算部14は、自車が駐車場の建物内に存在するか否かを判定するとともに、自車が建物内に存在すると判定された後に、自車が建物の屋上に存在するか否かを判定する屋内・屋上判定部28と、自車が駐車場を脱出したか否かを判定する駐車場判定部30と、自車が建物の屋上に存在すると判定された場合に、駐車場判定部30により自車が駐車場を脱出したと判定されないように判定制御を行う判定制御部32とを有する。
(もっと読む)
位置特定受信機のための相互相関抑制技術
本開示は、位置決め信号において相互相関の影響を抑制する方法およびデバイスを提供する。より弱い位置決め信号と干渉位置決め信号との間に電力の不均衡があり、あるドップラーオフセットが存在するとき、相互相関は、より弱い信号を捕捉することを困難にする。しかしながら、受信機は、干渉信号の送信信号スペクトルを使用して、送信された干渉信号に対してより低い電力を含む周波数ビンを識別する。受信機は次に、所望の位置決め信号の検出において、識別された周波数ビンを強調する。 (もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム
【課題】前回の測位位置が現在位置と大きく異なる場合であっても、マルチパスを確実に排除することができる測位装置等を提供すること。
【解決手段】高信頼度衛星HSVを含む基準衛星群BSを生成する基準衛星群情報生成手段と、基準衛星群BSを使用して基準位置BPを示す基準位置情報を生成する基準位置情報生成手段と、第1擬似距離と第1近似距離との差分である第1差分を算出する第1差分算出手段と、第1差分が、直接波に対応する範囲として予め規定した第1測位使用可能範囲内か否かを判断する第1測位使用可能性判断手段と、第1測位使用可能範囲内の第1差分に対応する通常衛星と高信頼度衛星を構成要素とする第1測位使用衛星群を生成する第1測位使用衛星群生成手段と、第1測位使用衛星群を使用して測位を行い、出力用の測位位置を示す測位位置情報を生成する第1測位位置情報生成手段等を有する。
(もっと読む)
測位システムおよび端末
【課題】GPS測位において、個々の衛星が配信する補正情報の量を増やさずに、端末での補正の精度を向上させること。
【解決手段】本発明に係るGPS補正情報配信システム100では、複数の補完衛星51〜53から端末60に、地理的あるいは時間的に補完関係を有する補正情報を配信する。これにより、個々の補完衛星が配信する補正情報の量を増やさずに、端末60におけるGPS測位の補正の精度を向上させることができる。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 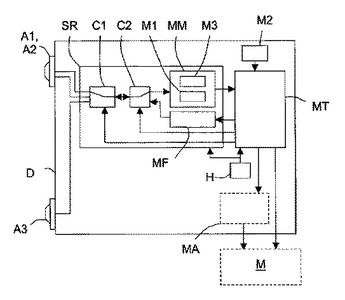 (もっと読む)
(もっと読む)
GPS受信装置
【課題】相関処理に要する時間を短縮することができるGPS受信装置を提供する。
【解決手段】GPS受信装置に、周波数の異なるL1波帯の測位信号およびL2波帯の測位信号に対して付加する同期信号を生成する手段と、前記同期信号が付加されたL1波帯の測位信号と前記同期信号とに基づいて、タイミングを決定し、該タイミングで、前記同期信号が付加されたL1波帯の測位信号とPコードレプリカ信号との相関処理を行う手段と、前記タイミングに基づいて、前記同期信号が付加されたL2波帯の測位信号と、Pコードレプリカ信号との相関処理を行う手段と、前記同期信号が付加されたL1波帯の測位信号およびL2波帯の測位信号と、Pコードレプリカとの相関処理に基づいて求められた位相に基づいて、L1およびL2波帯の測位信号の復調処理を行う手段とを備えることにより達成される。
(もっと読む)
測位用演算装置及び電離層遅延量算出方法
【課題】測位を行う時間帯や受信機から見える衛星の状況に応じて、GPSモデルによる電離層遅延量推定と、2周波による電離層遅延量推定とを混合して使用し、正確な電離層遅延量を算出することができる測位用演算装置及び電離層遅延量算出方法を提供することを目的とする。
【解決手段】所定の時間に同じ衛星を用いて算出した、GPSモデルによる電離層遅延量と2周波による電離層遅延量との差から、擬似距離の観測量に含まれる受信機固有の周波数間バイアスを算出する。そして、IFBを除去した擬似距離を使った2周波による電離層遅延量とGPSモデルによる電離層遅延量とから、これらの値のいずれかを選択、あるいは加重平均することにより、測位演算時に使用する電離層遅延量を算出する。
(もっと読む)
1,061 - 1,070 / 1,802
[ Back to top ]