
国際特許分類[G01S7/32]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ13/00による方式のもの (2,705) | パルス方式の細部 (874) | 受信機 (643) | 反響パルス信号の整形;反響パルス信号から非パルス信号の導出 (172)
国際特許分類[G01S7/32]に分類される特許
1 - 10 / 172
車両用歩行者検知装置、車両用歩行者保護システム
【課題】歩行者をより確実に追尾することが可能な車両用歩行者検知装置等を提供すること。
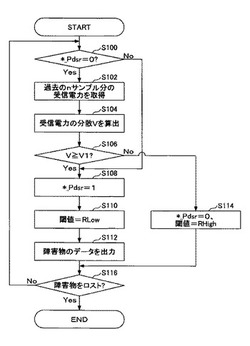
【解決手段】車両に搭載される車両用歩行者検知装置であって、車両周辺に放射した電磁波が障害物で反射されて前記車両に帰還した反射波を受信する受信手段と、前記受信手段が受信した反射波のデータを格納する記憶手段と、前記記憶手段に格納された反射波のデータを参照して前記反射波の強度の分散を算出し、該算出した反射波の強度の分散が基準値以上である場合に前記障害物が歩行者であると判別し、前記障害物が歩行者であると判別した後、同一の障害物を歩行者とみなして該歩行者の位置に関する情報を出力する制御手段と、を備える車両用歩行者検知装置。
(もっと読む)
等価時間サンプリング装置、オシロスコープ、レーダ装置、および、等価時間サンプリング方法

【課題】一部に時間的に変化する領域を含む対象信号を正確にサンプリングすること。
【解決手段】周期性を有する対象信号を等価時間サンプリング方式に基づいてサンプリングする等価時間サンプリング装置1において、対象信号の周期に対応する一定期間に亘って対象信号を所定の間隔でサンプリングするとともに、当該一定期間のサンプリングをフィールドとした場合に、当該フィールドを複数回実行するサンプリング手段(サンプリング部2)と、対象信号において変化する領域を検出する検出手段(制御部3)と、検出手段の検出結果に基づいて、サンプリング手段を制御し、変化する領域に対応するフィールドの開始のタイミングを調整する調整手段(調整部5)と、を有することを特徴とする。
(もっと読む)
情報表示装置、レーダ装置、ソナー装置、及び情報表示方法
【課題】センサの検出内容に所定の処理を行って得られる情報を表示する情報表示装置において、検出対象が信号処理の影響で消えたのか検出対象自体が存在しないのかをユーザが把握できるように情報の表示を行う構成を提供する。
【解決手段】レーダ指示器(情報表示装置)は、センサ信号取得部と、信号処理部と、表示部と、を備える。センサ信号取得部は、レーダアンテナの検出内容を示す信号であるセンサ信号を取得する。信号処理部は、センサ信号取得部が取得したセンサ信号に対して、第1信号処理部による第1信号処理と、第2信号処理部による第2信号処理と、を行う。表示部は、第1信号処理部を行った第1情報を表示画面に表示するとともに、第2信号処理を行った第2情報のうち、前記第1情報と異なる情報を、当該第1情報と異なる表示形態(表示色等)で表示画面に表示する。
(もっと読む)
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
侵入検知システム及び侵入検知装置
【課題】1名の設定作業者のみで容易に閾値調整を行うことを可能にする。
【解決手段】送信側漏洩伝送路2と受信側漏洩伝送路3との間に侵入物が侵入したときの上記受信電波の変動量を発報する発報手段5,6と、上記受信側漏洩伝送路を介して上記テーブル15の閾値を変更する信号を発生する遠隔操作部110とにより、閾値設定作業者による上記両伝送路間への試験的侵入による上記発報手段からの上記受信電波の変動量の発報に基づいて、上記遠隔操作部により上記ブロック毎に適正な閾値に調整されることを特徴とする
(もっと読む)
レーダー信号の時空間適応処理を用いて不均一な環境においてターゲットを検出する方法、および時空間適応処理を用いて不均一な環境のレーダー信号内のターゲットを検出する方法およびシステム
【課題】レーダー信号の時空間適応処理を用いて不均一な環境においてターゲットを検出する方法の提供。
【解決手段】正規化トレーニングデータを得るために不均一な環境のトレーニングデータを正規化することと、正規化トレーニングデータを表す正規化サンプル共分散行列を求めることと、クラッター部分空間行列を得るために正規化サンプル共分散行列によって表される部分空間を追跡することと、クラッター部分空間行列およびステアリングベクトルに基づいてレーダー信号内のターゲットの存在の尤度を表す検定統計量を求めることと、ターゲットを検出するために検定統計量を閾値と比較すること。
(もっと読む)
車載レーダ装置
【課題】自車の走行に支障をきたす障害物と、障害になり得ない停止物とを精度よく区別して、衝突回避装置若しくは衝突被害軽減装置に於ける誤作動を防止させることのできる車載レーダ装置を得ることを目的とする。
【構成】所定の演算周期毎に前記物体の識別を行う物体識別部と、前記物体識別部が識別した前記物体と前記車両との間の相対的状態を判定するとともに、その判定結果に基づいて、次回の前記演算周期に於いて前記第1の角度検出部と前記第2の角度検出部とのうちの一方から他方へ切り替えて前記物体識別部に前記入射角度の値を入力する切り替え制御を行なう状態判定部とを備えた。
(もっと読む)
物標を探知して表示する装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
1 - 10 / 172
[ Back to top ]