
国際特許分類[G01S7/52]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ15/00による方式のもの (803)
国際特許分類[G01S7/52]の下位に属する分類
構造的特徴 (316)
パルス方式の細部 (327)
非パルス方式の細部 (3)
対抗手段または対対抗手段,例.妨害,対妨害
物標の特徴づけのためのエコー信号の分析を用いるもの;物標の特色;物標の断面 (3)
離れて設置された受信機をもつもの
表示装置 (65)
発光体指示 (2)
国際特許分類[G01S7/52]に分類される特許
1 - 10 / 87
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
観察装置
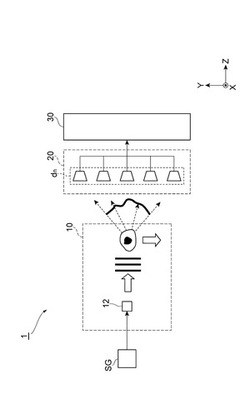
【課題】信号取得レートが低い検波器を用いる場合であっても移動している対象物の像を高速に高感度で得ることができる観察装置を提供することを目的とする。
【解決手段】観察装置1は、信号発生部SG、回折音波発生部10、検出部20、および演算部30を備える。回折音波発生部10は、移動している対象物へ光を照射して、光音響効果により対象物から回折音波を発生させる。検出部20は、検波面上の各位置に到達した音波のドップラーシフト量に応じた周波数で時間的に変化するデータのv方向についての総和を表すデータを、u方向の各位置について各時刻に出力する。演算部30は、検出部20の出力に基づいて対象物2の像を得る。
(もっと読む)
音響材料の音響特性計測方法および音響材料の音響特性計測装置

【課題】供試体に対する音波の入射角の制約を解消する上で有利となる音響材料の音響特性計測方法および音響材料の音響特性計測装置を提供する。
【解決手段】第1〜第4の送波器T1〜T4を、同一方向を指向し、かつ、直線上に等しい間隔dをおいて並べて配置し、第1〜第4の送波器T1〜T4から送波される第1の音波W1の位相がそれぞれ位相差φずつずれるように駆動信号を生成させ、第1〜第4の送波器T1〜T4から送波される4個の第1の音波W1によって形成される等位相面Pの進行方向と供試体2の表面の法線とがなす入射角θが0度よりも大きな角度となるようにした。受波器Rでは、第1の音波W1が供試体2によって反射された反射波である第2の音波W2を受波する。第2の音波W2の音圧レベルP2を算出し、音圧レベルP2から音響特性を算出する。
(もっと読む)
物体検出支援システム、制御方法、及びプログラム
【課題】送信器から発せられる検出波による物体の検出を支援すること。
【解決手段】設定部110と、送信レベル取得部120と、設定部110に保持されている送信器510及び受信器の各位置情報に基づいて、伝播損失を受信器から見た方位と距離の関数で表す伝播損失関数として算出する伝播損失関数推定部130と、設定部110に保持されている物体情報の物体について、外部のデータベース600から当該物体のターゲットストレングスを抽出するターゲットストレングス取得部140と、送信レベル取得部120が取得した送信レベル情報と、伝播損失関数推定部130が算出した伝播損失関数と、ターゲットストレングス取得部140が抽出したターゲットストレングスとに基づいて、信号レベルを受信器からの方位と距離の関数で表す検出信号レベル関数を求め、外部の表示手段700に表示させる検出信号レベル関数推定部150とを備える。
(もっと読む)
重機制御装置
【課題】深海でも重機を含めた俯瞰地形を測定して重機の位置や重機周辺の地形を把握できる。
【解決手段】重機制御装置1は、海底を移動可能な採鉱機2を第一のアンビリカントケーブル4Aを介して母船3に接続した。採鉱機2から第二のアンビリカントケーブル4Bを介して上方に浮体7を接続して浮かせ、浮体7の下側にソナーヘッド8を備えた。ソナーヘッド8は超音波を発振してその反射によってエコー画像を得て、採鉱機2または/及びその周辺の地形を監視する。エコー画像は第二及び第一のアンビリカントケーブル4B、4Aを介して母船で受信できる。第二のアンビリカントケーブル4Bは採鉱機2に設けたウインチに巻き取り可能に取り付け、巻き取りと繰り出しによってソナーヘッド8の高さを調整できる。
(もっと読む)
水中物体捜索計画立案支援方法およびその装置
【課題】水中物体がとり得るあらゆる回避行動パターンを想定した上で、水中物体を効率良く捜索する捜索計画を立案すること。
【解決手段】本発明は、海洋内に潜在する水中物体を捜索する捜索計画の立案を支援する、水中物体捜索計画立案支援装置が行う水中物体捜索計画立案支援方法に適用される。本方法は、前記水中物体の複数の回避行動パターンと、前記複数の回避行動パターンの各々の発生確率と、を記憶部に設定する設定ステップと、捜索領域内に前記水中物体が一様に分布する状態を初期状態として、前記発生確率に応じた回避行動パターンに従って前記水中物体を回避行動させるシミュレーションを開始するシミュレーションステップと、シミュレーション後における前記捜索領域内の前記水中物体の存在分布を表示部に表示する表示ステップと、を有する。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
水底下物体の探査類別方法
【課題】探査と類別の計測時間を短縮可能な水底下物体の探査類別方法を提供する。
【解決手段】予め、形状や材質の異なる複数の既知の水底下物体21を用い、水中航走体2を既知の水底下物体21の周りで直線状あるいは曲線状に航行させたときの散乱波のレベルパターンを作成してデータベースとして蓄積しておき、水中航走体2を、測定対象の水域で直線状あるいは曲線状に航行させつつ、送波器3から音波を送波して散乱波の計測を行うと共に、水中航走体2を、測定対象の水域で格子状に縦横に航行させて、測定対象の水域中の任意の測定点に対して散乱波の計測を行うようにし、計測した散乱波の強度から水底下物体21を検知すると共に、計測した散乱波の強度を基に散乱波のレベルパターンを作成し、当該散乱波のレベルパターンをデータベースと照合することで、水底下物体21の類別を行う。
(もっと読む)
超音波計測システム
【課題】低消費電力で、距離を高精度に測定出来る超音波計測システムを提供する。
【解決手段】送信トランスデューサから複数の連続波を周波数を変化させ送信し、受信トランスデューサでは受信波の送信波に対する相対的な振幅と位相を求め、これ等の値を元に離散的フーリエ変換しインパルス応答波形を得、この波形から送受信トランスデューサと反射物体までの距離を特定するシステムで、事前に測定データからトランスデューサの位相特性を差っ引くことで高い測定精度を得る。また、離散的フーリエ変換波形の包絡線ではなく波形そのものを用いて距離を測定することにより、極めて高精度な測定が可能となる。更に、時間の異なる2点の離散的フーリエ変換波形の差から物体の動きを特定することが可能となる。
(もっと読む)
海底音響映像システム
【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
1 - 10 / 87
[ Back to top ]