
国際特許分類[G02B21/32]の内容
物理学 (1,541,580) | 光学 (228,178) | 光学要素,光学系,または光学装置 (130,785) | 顕微鏡 (4,815) | 顕微鏡に構造的に結合されたマイクロ・マニプレータ (116)
国際特許分類[G02B21/32]に分類される特許
1 - 10 / 116
溶質分子輸送装置および方法
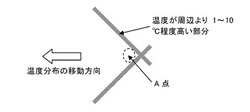
【課題】液相の溶質分子の非接触移動手段に関するもので、電気的な手法、あるいは光圧を用いずに、静止した溶液中で、溶質分子のみを、2次元あるいは3次元の任意の方向に高効率に移動させる装置及び方法を提供する。
【解決手段】液体中に2次元的あるいは3次元的に微細な温度分布を形成し、温度分布をソーレー効果による分子流速とほぼ同じ速度で移動することで、高効率にソーレー効果による高濃度領域を形成し、高濃度領域を移動させることで、溶質分子の移動を実現する。
(もっと読む)
微小付着物剥離システムおよび微小付着物剥離方法

【課題】基材の表面に付着した大きさが1mm以下の微小付着物に大きな損傷を与えることなくかつ選択的に剥がすことができる微小付着物剥離システムを提供する。
【解決手段】微小付着物剥離システム100は、細胞からなる微小付着物Wを観察するための顕微鏡110を備えている。顕微鏡110のステージ111の周囲には、微小付着物Wを剥がすためのヘラ状の剥離具140を変位可能に保持する剥離具変位装置130および剥離した微小付着物Wを培養基Cごと吸引する付着物吸引装置150が設けられている。ユーザは、コントローラ160および外部コンピュータ装置170を介して剥離具変位装置130を操作することにより剥離具140の挿込部141をシャーレSの底部表面に押し付けた状態で変位させて微小付着物Wを剥離させるとともに剥離した微小付着物Wを付着物吸引装置150によって吸引して捕捉する。
(もっと読む)
複数の姿勢においてプローブを用いて物体をプロービングすることによってプローブを物体とレジストレーションする方法およびシステム
【課題】複数の姿勢においてプローブを用いて物体をプロービングすることによって、プローブが物体とレジストレーションされる方法を提供する。
【解決手段】プローブ110の各姿勢は、ロケーションおよび向きを含む。プローブ110の現在のロケーションの確率分布が、粒子のセットによって表され201、プローブ110の現在の向きの確率分布が、各粒子について、現在のロケーションを条件とするガウス分布によって表される。候補動作のセットが選ばれ215、各候補動作について、粒子のセットに基づく期待不確実性が求められる220。最小の期待不確実性を有する候補動作が、プローブ110の次の動作として選択され230、プローブ110は、次の動作に従って移動され202、粒子のセットは、プローブ110の次の姿勢を用いて更新される210。
(もっと読む)
アクチュエータ及びアクチュエータを備えるマニピュレータ及びアクチュエータを用いた細胞の操作方法
【課題】操作対象となる細胞の周囲の培養細胞を損傷せず、前記細胞のみをシャーレから除去、または回収することが可能なアクチュエータを提供する。
【解決手段】対向配置した2つの転がり軸受と、2つの転がり軸受の各内輪の内周面と嵌合する回転軸と、2つの転がり軸受の各内輪の間に設けられた内輪間座と、回転軸と連結されるボールねじナットと、ボールねじナットと螺合するねじ軸と、2つの転がり軸受のうち一方の外輪に隣接配置される圧電素子と、2つの転がり軸受と圧電素子に予圧を付与するスペーサと、ねじ軸の軸方向に接続されたガラス針とを有するアクチュエータであって、ガラス針の先端部と操作対象となる細胞とを接触させ、圧電素子を超音波振動よりも低い周波数で微細伸縮させることによりガラス針を微小振動させ、細胞の貼りつきを解除し、細胞を入れたシャーレの底面から細胞を剥離または除去することを特徴とする。
(もっと読む)
試料採取用プローブ及び試料採取方法
【課題】既存の試料採取装置であっても試料を良好に採取するための試料採取方法を提供する。
【解決手段】誘電体棒10と、誘電体棒10の先端に形成される捕捉面10bと、誘電体棒10の後端側に設けられる露出領域と、誘電体棒10のうち捕捉面10bと露出領域の間の領域において、誘電体棒10を覆う導電性被覆層12と、を有するプローブ1のうちの露出領域を誘電体物により摩擦して誘電体棒10を帯電し、プローブ1の捕捉面10bにより試料8を吸着し、プローブ1の操作により試料8を試料ホルダ6に移送する処理を含む。
(もっと読む)
顕微鏡用物体の検査及び操作のための装置及び方法
【課題】光軸に沿ったその広がりが使用される顕微鏡対物レンズの焦点深度より大きい三次元物体をも検査及び操作すること。(その際三次元物体のあらゆる位置における物体操作が可能とする。)
【解決手段】(a)顕微鏡(2);(b)照明光線路(5)を規定し、物体(1)を照明するための少なくとも1つの第一光源(3、4);(c)検出光線路(7)を規定し、物体(1)からの戻り光を検出するための検出器(6);(d)操作光線路(9)を規定し、物体(1)を操作するための第二光源(8)を有する顕微鏡用物体の検査及び操作用の装置及びその操作方法において、
前記顕微鏡(2)は、共焦点走査型顕微鏡であり、第一光線偏向装置(12)が、前記照明光線路(5)に、第二光線偏向装置(16)が、前記操作光線路(9)に夫々配されているとともに、該照明光線路(5)における光の偏向は、該操作光線路(9)における光の偏向と独立に行われることを特徴とする。
(もっと読む)
細胞マニピュレータ
【課題】インジェクションピペットに対する微動動作とインジェクション動作を同一の手
段で実施すること。
【解決手段】細胞に針を挿入するインジェクションピペット34と、インジェクションピ
ペット34の位置を制御するXY軸テーブル36およびZ軸テーブル38を備え、インジ
ェクションピペット34を支持するZ軸テーブル38に微動機構44を内蔵し、微動機構
44は、印加電圧に応じてインジェクションピペット34の長手方向に沿って伸縮する圧
電素子54と、圧電素子54に対する印加電圧を制御する制御回路を有し、圧電素子54
は、微動用電圧の印加に応答してインジェクションピペット34をその長手方向に沿って
微動駆動し、インジェクション用電圧の印加に応答してインジェクションピペット34に
針を挿入するための押圧力を付与する。
(もっと読む)
3次元共焦点観察用装置及び観察焦点面変位・補正ユニット
【課題】光ピンセットを用いた試料の操作中に、光トラップに影響を与えることなく試料の3次元像を取得できる3次元共焦点観察用装置を提供する。
【解決手段】 共焦点顕微鏡と光ピンセット技術を組み合わせた3次元共焦点観察用装置において、固定の対物レンズと蛍光撮像用カメラとの間に、一方のレンズが光軸方向に移動可能とされている焦点面変位用レンズペアを配置し、かつ、蛍光撮像用カメラにより得られた蛍光共焦点像の歪みを補正する手段を設ける。
(もっと読む)
異物除去装置および異物除去方法
【課題】異物を確実に把持し、短時間で除去することが可能な異物除去装置を提供する。
【解決手段】異物除去装置101は、基板1の表面に付着した異物を除去するための異物除去装置であって、前記異物を把持するための把持手段としてのピンセット2と、前記表面を観察するための観察光学系3と、ピンセット2を観察光学系3とは別に前記表面に対して垂直な方向に移動させるための第1駆動部としてのZ′軸機構と、ピンセット2および観察光学系3を一体的に保持した状態でピンセット2および観察光学系3を前記表面に対して垂直な方向に移動させるための第2駆動部としてのZ軸機構7と、基板1を前記表面に平行な方向に移動させるための第3駆動部としてのX軸機構51およびY軸機構52と、ピンセット2で把持した前記異物を吸引回収するための回収部8とを備える。
(もっと読む)
マイクロ操作ツールを無衝突で位置決めする方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
1 - 10 / 116
[ Back to top ]