
国際特許分類[G05B13/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 適応制御系,すなわちあらかじめ指定された規準に対して最適である行動を行なうようにそれ自体を自動的に調整する系 (1,027)
国際特許分類[G05B13/00]の下位に属する分類
電気式 (992)
国際特許分類[G05B13/00]に分類される特許
1 - 10 / 35
制御装置及び方法
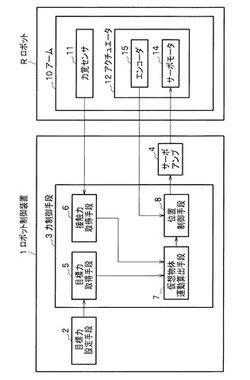
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム

【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
アクチュエータの制御装置
【課題】アクチュエータの動作限界付近での入力外乱抑圧性能を向上させる。
【解決手段】入力外乱抑圧性能を持つフィードバック制御器(スライディングモード制御器)と、そのフィードバック制御器で生成した制御入力と入力制限値との差にゲインを乗じた値を上記フィードバック制御器の入力側にフィードバックするアンチワインドアップ制御器とを備えたアクチュエータの制御装置において、上記入力制限値を、アクチュエータの動作限界値から決定される入力量に、入力外乱抑圧性能を持つフィードバック制御器で補償すべき入力外乱を加えた値に設定する。このような設定により、アクチュエータの動作限界値まで制御入力の演算が可能になり、その動作限界付近での入力外乱抑圧性能が向上する。
(もっと読む)
スライディングモード制御装置の制御入力設定方法
【課題】スライディングモード制御装置において、切換入力の平滑関数パラメータを理論的に決定できるようにする。
【解決手段】平滑関数パラメータδを、定常偏差σと切換入力unlとを座標軸とする座標上で定常偏差限界σeに安全率を見込んだ値σth[σe−安全率]と入力変動最大値dmaxとによって定まる点Paと座標の原点[0,0]とを結ぶ直線Laよりも切換入力軸側の範囲で設定することで、定常偏差限界σeの時に切換入力unlが入力変動最大値dmaxよりも上回るようになり、入力変動に対するロバスト性を確保することができる。このように、平滑関数パラメータδを、σ−unl座標を用いて定常偏差限界σeと入力変動最大値dmaxとに基づいて設定することで、平滑関数パラメータδを理論的に設定することが可能となり、作業者によるチューニング結果やチューニング工数のばらつきを低減することができる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
スライディングモード制御における切替線の設計装置及び設計方法
【課題】スライディングモード制御における切替線を自動算出する。
【解決手段】最適応答設計部11は、制御対象40のモデルに対して、所定の操作量飽和時間の間操作量の上限値である第1操作量を入力し、その後安定負荷率に応じた第2操作量を入力する入力波形を入力したときの、制御量の時間応答を計算する。求められた時間応答に基づいて、予め定められた評価関数の値を求める。複数の操作量飽和時間について時間応答と評価関数の値を求め、操作量飽和時間毎の評価関数の値を求める。求められた評価関数の値が、所定の条件を満足する操作量飽和時間をひとつ選択する。最適切替線算出部12は、選択された操作量飽和時間における制御量及びその微分値と、目標値とに基づき、スライディングモード制御の切替線の傾きを求める。スライディングモード制御演算部20は、求められた傾きに従い、スライディングモード制御の切替線のパラメータを求める。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
1 - 10 / 35
[ Back to top ]