
国際特許分類[G05B17/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 系のモデルまたはシミュレータの使用を伴う系 (82)
国際特許分類[G05B17/00]の下位に属する分類
電気式 (60)
国際特許分類[G05B17/00]に分類される特許
1 - 10 / 22
電動機器のシステム設計支援装置
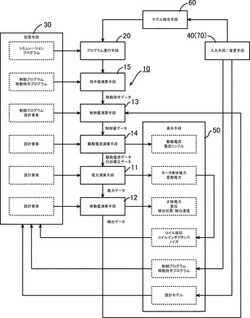
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
モデリング装置および該方法

【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム
【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
PIDパラメータ調整支援装置および方法
【課題】ユーザがPIDパラメータ調整の行き詰まりに至る確率を低減する。
【解決手段】PIDパラメータ調整支援装置は、知識型の調整手法を実行してPIDパラメータの推奨値を探索する知識型調整部20と、分析型の調整手法を実行してPIDパラメータの推奨値を探索する分析型調整部21と、知識型調整部20と分析型調整部21とによるPIDパラメータの推奨値を提示する調整情報提示部3とを備える。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、数値解析データと実際のプラント特性との誤差が大きい場合においても、計測データによるモデル修正を短期間で終了できる、又は、データ蓄積による統計モデル構築時間増加を回避できる機能を具備したプラントの制御装置又は火力発電プラントの制御装置を提供することにある。
【解決手段】プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる解析モデルデータの選択、又は計測モデルデータを削除する機能を具備するモデル修正部とを備え、前記統計モデルは前記モデル修正部によるモデルデータの修正結果を用いてモデル出力を生成する制御装置。
(もっと読む)
関節の運動シミュレーションに関するシステム及び方法
【課題】人工器官の要素の加速摩耗試験中に、人工器官の要素を駆動する人工器官駆動機構を備えたシミュレータを提供する。
【解決手段】シミュレーション入力は、シミュレータの動作を表し、センサ機構を使用し、人工器官の要素に加えられる力及びトルクを測定する。位置制御センサ及び向き制御センサをさらに使用し、人工器官要素の変位を測定する。センサに応答する閉ループフィードバック制御システムを使用して、駆動機構の駆動信号を決定する。制御システムは、有利には、靱帯繊維の機械的表現を組み込む計算モデルを追加する。計算モデルは、人体内の人工器官が直面するであろう状況の非人間近似であり、靱帯繊維の挿入部位及び機械的特性の寸法的幾何学的形状を含む。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 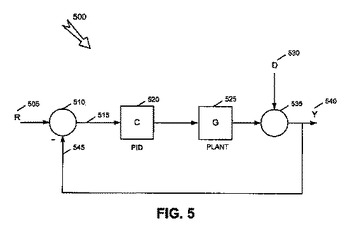 (もっと読む)
(もっと読む)
シミュレーションシステム
【課題】過去に設定されたモデルパラメータを効率よく再利用できるシミュレーションシステムを実現すること。
【解決手段】実際のシミュレーション対象に入力されたデータに基づきシミュレーションを実行しながら、前記シミュレーション対象の出力と前記シミュレーションの結果が一致するようにパラメータを調整するシミュレーションシステムにおいて、前記シミュレーションの結果を保存するシミュレーション結果データベースと、前記シミュレーション時に設定した前記パラメータの履歴を保存するパラメータ履歴データベースと、このパラメータ履歴データベースから前記シミュレーション対象の出力値に対応するモデルパラメータについて前記シミュレーションをした結果と前記シミュレーション対象の出力一致度を時系列的に計算する適合率計算部とを有することを特徴とするもの。
(もっと読む)
1 - 10 / 22
[ Back to top ]