
国際特許分類[G05G23/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 機械的構成のみによって特徴づけられた制御装置または制御系 (1,489) | 制御機構の一部分の正確な位置決めを保証する手段,例.運動を開始するための (3)
国際特許分類[G05G23/00]の下位に属する分類
自己調整
国際特許分類[G05G23/00]に分類される特許
1 - 3 / 3
左右連動操作装置
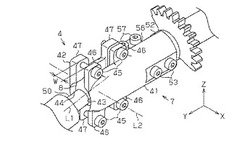
【課題】左右のグリップ間に操作ガタを生じ難くすることができる左右連動操作装置を提供する。
【解決手段】左右のグリップは、ボールジョイント4と4本のワイヤーケーブルとを介して連結される。グリップは、一方の操作がワイヤーケーブルを介して他方に伝達されることにより、左右のグリップが連動する。グリップは、ボールジョイント4を介してグリップ支持部に接続される。ボールジョイント4の球頭部8は、一対の挟持板41,42によって挟持されて、これら挟持板41,42のガタ調整ねじ締結部46,47を複数のガタ調整ねじ45によって締付量を調整して締結させる。そして、過荷重操作されたときには、過荷重による負荷をガタ調整ねじ締結部46,47に分散させる。
(もっと読む)
制御データ発生装置

【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
カートリッジ化配管接続装置及び回分生産システム
1 - 3 / 3
[ Back to top ]