
国際特許分類[G05G9/04]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 機械的構成のみによって特徴づけられた制御装置または制御系 (1,489) | 二つ以上の被制御部材と共働する一つの制御部材を備えた手動制御機構,例.選択的に共働するもの,同時に共働するもの (164) | 制御部材が異なる独立した径路を動くことができ,各独立した径路内の運動は一つの被制御部材のみを作動させるもの (144) | 二つ以上の径路の運動が同時に起ることができるもの (140)
国際特許分類[G05G9/04]の下位に属する分類
国際特許分類[G05G9/04]に分類される特許
1 - 9 / 9
力覚提示装置
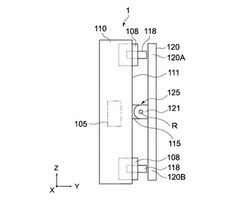
【課題】ユーザに直感的な力覚を提示可能な力覚提示装置を提供する。
【解決手段】力覚提示装置は、本体と、第1の可動部と、第1の駆動機構とを具備する。
上記本体は、第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む。上記第1の可動部は、上記把持部の少なくとも一部を被覆し、上記本体に対して上記第1の軸と交差する第2の軸方向へ変位可能である。上記第1の駆動機構は、上記本体に設けられ、上記本体に対して上記第1の可動部を上記第2の軸方向へ変位させることで上記第1の軸及び上記第2の軸に各々に交差する第3の軸回りのモーメントを上記把持部に発生させる。
(もっと読む)
左右連動操作装置

【課題】左右グリップの間に操作ガタを発生し難くすることができる左右連動操作装置を提供する。
【解決手段】左右のグリップ3a,3bは、ユニバーサルジョイント4と4本のワイヤーケーブル2a〜2dとを介して連結される。グリップ3a,3bは、一方の操作がワイヤーケーブル2a〜2dを介して他方に伝達されることにより、左右のグリップ3a,3bが連動する。ユニバーサルジョイント4の出力軸と、ワイヤーケーブル2a,2bに繋がる可動片12とを、一対の磁石33,34からなる磁気式クラッチ11により連結する。そして、グリップ3a,3bが過荷重操作されたときには、磁気式クラッチ11により左グリップ3bを空転させ、過荷重をグリップ3a,3bから逃がすようにする。
(もっと読む)
作業支援装置
【課題】作業機と作業対象との間の詳細な位置関係を、容易且つ明瞭に把握できるようにする。
【解決手段】把持装置11から作業対象80までの距離を検知する距離センサ21と、運転者の触覚に作用して、運転者に距離の情報を伝える距離伝達手段3と、距離伝達手段3を制御する第1制御部41と、を備える。距離伝達手段3は、把持装置11を動作させるための操作レバー12に設けられており、且つ、運転者に接触して、当該運転者の触覚に作用するように動作する円板(接触部)31を有する。第1制御部41は、円板31による触覚への作用を、距離センサ21で検知された距離の長さに関連させて変化させる。
(もっと読む)
作業車両
【課題】作業車両において、前進ペダル及び後進ペダルの連動機構を簡素化する。
【解決手段】ペダルブラケット31が有するアーム取付部31aは、前進ペダルアーム21を一側に支持するための第1支持部31cと、後進ペダルアーム22を他側に支持するための第2支持部31dと、を備える。前進ペダルアーム21においては、その一端側には前進ペダル23が取り付けられ、中間部には当該前進ペダルアーム21を第1支持部31cに回動可能に支持させるための回転中心部21aが設けられ、他端側には第1連結部21bが設けられている。後進ペダルアーム22においては、その一端側には後進ペダル24が取り付けられ、中間部には第2連結部22bが設けられ、他端側には当該後進ペダルアーム22を第2支持部31dに回動可能に支持させるための回転中心部22aが設けられている。第1連結部21bと第2連結部22bが、連結部材32によって連結されている。
(もっと読む)
多方向入力装置
【課題】傾動操作時にアナログ信号が出力可能で小型薄型化が容易な多方向入力装置を提供すること。
【解決手段】基台1の内底面1aの外周部に複数の接点部11を配設し、これら接点部11に圧接可能な感圧導電ゴム3を内底面1a上に対向して配置させると共に、基台1上で多方向へ傾動操作可能な導電性の操作体4を感圧導電ゴム3を覆うように配置させる。また、導電性の環状部材であるフレーム部材7を基台1に外装し、操作体4の外周部の複数箇所に設けた被規制部4bがフレーム部材7に当接して上動が規制されるようにする。傾動操作時に操作体4の径方向一端側で被規制部4bが傾動支点となり、かつ径方向他端側で感圧導電ゴム3が操作体4に加圧されて所定の接点部11上で圧縮するようになし、この接点部11とフレーム部材7との導通状態が感圧導電ゴム3の圧縮量に応じて変化するようにした。
(もっと読む)
車両用手操作子
【課題】操作が簡単で、外観性が良く、パーキングレバーの十分な大きさが確保できる車両用手操作子を提供することを課題とする。
【解決手段】ハンドルバーに、第1支軸12を介して回動可能に取付けられ乗員が回動操作する第1手操作子13と、第2支軸14を介して回動可能に取付けられる第2手操作子15とからなり、第2手操作子15で駐車中に車両を駐車状態にすることができる車両用手操作子において、第1手操作子13には、第1支軸12を中心に回動可能な出力部26が一体的に設けられ、第2手操作子15には、出力部26で押されて、第2支軸14を中心に回動する入力部44が一体的に設けられている。
【効果】第1手操作子13を操作するだけで、第2手操作子15を連動させることができ、パーキングブレーキの解除操作が極めて容易に行える。
(もっと読む)
ワンレバー操作式軌条運搬車
【課題】ワンレバーで主要運転操作を全て行えるようにするとともに、ずり落ち及びエンジンストールを容易な調整で回避でき、しかも動作信頼性の高い安価な軌条運搬車を提供する。
【解決手段】1本の運転操作レバー52を1本の基軸51に接続し、その基軸に接続した機械リンク機構54〜57のみにより、エンジン1、ブレーキ6、トランスミッション2、クラッチ3を全てシーケンシャルに駆動できるようにした。また、ブレーキ6とクラッチ3とがアナログ的に穏やかに切り替わるように構成するとともに、例えば発進時において半ブレーキ領域と半クラッチ領域とが重合するように構成し、走行駆動輪4にブレーキ6又はエンジン1からの拘束力が常に作用するようにした。
(もっと読む)
入力操作装置
【課題】運転者の意図しない入力操作がなされても、その操作に基づく車両の動作を防止できる入力操作装置を提供する。
【解決手段】車両には、片手で操舵、加減速の各種操作が可能な入力操作装置1が設置されている。車両の操舵はグリップ5をその操舵回転軸線Ls回りに回転操作して操舵入力操作部10に入力操作することで行い、車両の加減速はアーム6を介してグリップ5を操舵回転軸線Lg回りに回転操作して加減速指示入力操作部11に入力操作することで行う。入力操作装置1は、操舵入力操作部10又は加減速指示入力操作部11の少なくとも一方が入力操作された際に、該入力操作が運転者の意図によるものか否かを判断し、運転者の意図しない入力操作がなされたと判断した場合にはその入力操作を無効化するコントローラを備えている。
(もっと読む)
遠隔操縦装置
【課題】 ロボットアーム等の操縦対象を直感的かつ少ない負担で操作でき、さらに操縦対象に多彩な運動を指示し得る遠隔操縦装置を提供する。
【解決手段】 ユーザの腕の動きをロボットアームに伝達するマスターアーム本体(リンク2a〜7a、関節2b〜7b、グリップ8)と、上記マスターアーム本体においてユーザの肘が載せられる部分に設けられ、2自由度の運動制御が可能な肘スイッチ10とを備えている。
(もっと読む)
1 - 9 / 9
[ Back to top ]