
国際特許分類[G06F17/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | 電気的デジタルデータ処理 (228,215) | 特定の機能に特に適合したデジタル計算またはデータ処理の装置または方法 (34,028)
国際特許分類[G06F17/00]の下位に属する分類
複合した数学演算 (567)
自然言語データの取扱い (7,890)
情報検索;そのためのデータベース構造 (17,914)
データ取得および記録 (50)
計算機利用設計 (7,589)
国際特許分類[G06F17/00]に分類される特許
11 - 18 / 18
気象予測装置
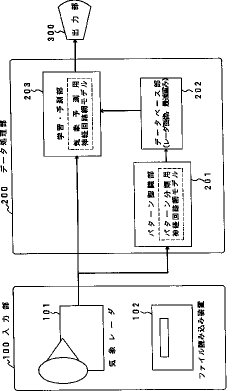
【目的】気象レーダ画像を系統的に分類・管理し,各クラスタごとのレーダ画像を用いて学習した神経回路網モデルの重みを利用することにより,新たに計測されたレーダ画像の学習時間を短縮する。また,不等間隔の予測時刻におけるレーダ画像を少ない計算量により求めることを目的とする。
【構成】入力部100 からのレーダ画像を,パターン分類用神経回路網モデルを用いてパターン分類する(201) 。その結果から該当するクラスタで過去に作成された学習・予測部203 で使用する神経回路網モデルの重みを得て,初期値として設定し,再学習する。また,パターン分類されたクラスタごとに最適な重みを作成し,データベース部202 に登録して利用する。また,予測時間を表す指標を,レーダ画像と共に学習・予測部203 の神経回路網モデルの入力とする。
(もっと読む)
物体変形処理方法

【目的】 コンピュータグラフィックスで弾性物体の移動しながらの弾性変形表現を可能にする。
【構成】 物体初期形状と属性情報、初期流速条件、境界条件などを入力した後(ステップ10,11)、あらかじめ定めた処理時間に達するまでステップ12〜19を繰り返す。ステップ12では、物体が移動する流体のn時刻の流速値を算出する。流体場は離散値系である。物体は複数の格子点で表現する。ステップ13では、各格子点の移動速度を算出する。ステップ14,15では、各格子点の座標値と弾性力を、値が収束するまで補正する。ステップ16では、各格子点の合力を求め、ステップ17では、それの流速場へ作用する外部力を求める。そして、ステップ18でn+1時刻の流体場を算出し、これを用いて、ステップ19でn+1時刻の各格子点の座標値を算出する。
(もっと読む)
クレーム対応支援方法
【目的】 量産電子機器に対する顧客のクレームを処理する際に使用するクレーム対応支援方法に関し、顧客満足度の維持・向上を図ることを目的とする。
【構成】 障害状態と障害原因及び対策との対応に設計者の知識を用いて関連付けた第1の知識ベースと、該第1の知識ベースを用いて入力した障害状態に対応する障害原因及び対策を推論する推論部と、修理支援部と、試験項目と試験方法との対応、試験項目と試験結果及び次の試験項目との対応、過去の障害状態とその原因及び試験方法との対応に設計者の知識を用いて関連付けた第2の知識ベースと、第2の知識ベースを検索して障害原因を推論する検索・推論部とを設け、該検索・推論部は、推論部が送出した該障害状態から過去の類似障害状態と原因候補を抽出し、対応する試験手順に従って試験して原因を推論し、推論原因と原因候補との一致を確認するまで推論を繰り返すように構成する。
(もっと読む)
最適解探索装置
最適解探索装置
【目的】 線形計画問題解決の処理効率を向上させた最適解探索装置を提供する。
【構成】 区間束縛条件保持手段1、共通束縛条件保持手段2内の区間束縛条件、共通束縛条件を束縛条件とし、目的関数計算手段5で計算された目的関数とともに線形計画問題を線形計画問題解決エンジン部6に渡す。線形計画問題解決エンジン部6では、線形計画問題ステータス保持手段11内のステータスに基づき、実行可能性判定を省略し、または線形計画問題基底解保持手段8に保持されている基底解を用いて計算する。基底解を計算により求めたときは、隣接問題基底解計算手段7により隣接問題の基底解を計算し、線形計画問題基底解保持手段8に登録する。実行可能性の判定、基底解の計算を行なったときには、線形計画問題ステータス計算手段9は、変更起点リスト10を用い、他の線形計画問題のステータスを計算し、変更する。
(もっと読む)
自動車の特性変更装置及び方法
運動制御システム
デジタルレーダシュミレーションにおいて三次元的な気象情報を実時間で発生させる方法、デジタルレーダ地表シュミレータ装置及びデジタルレーダ地表シュミレータ用の実時間高解像度気象チャンネル
11 - 18 / 18
[ Back to top ]