
国際特許分類[G06F17/12]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | 電気的デジタルデータ処理 (228,215) | 特定の機能に特に適合したデジタル計算またはデータ処理の装置または方法 (34,028) | 複合した数学演算 (567) | 方程式を解くためのもの (71) | 連立方程式を解くためのもの (38)
国際特許分類[G06F17/12]に分類される特許
1 - 10 / 38
挙動解析システム、挙動解析方法及び挙動解析プログラム
【課題】構造体の挙動を効率的に解析するための挙動解析システム、挙動解析方法及び挙動解析プログラムを提供する。
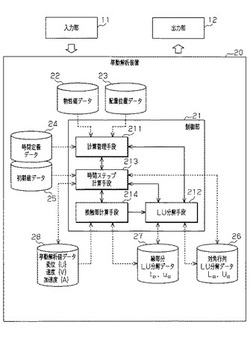
【解決手段】挙動解析装置20の制御部21は、縁付きブロック対角行列の縁部分を除いた各ブロック対角行列について、時間ステップのループの外側で、LU分解処理を実行して、下三角行列及び上三角行列を算出する。制御部21は、時間ステップのループ内において、接触がある場合には、接触条件を満足する縁部分に相当する行列の生成処理を実行する。制御部21は、生成した縁部分の行列のLU分解による要素l(i),u(i)を特定し、下三角行列及び上三角行列のそれぞれと合成して、処理対象の行列を生成する。制御部21は、処理対象の行列から、前進代入、後退代入を用いて速度修正量を算出し、変位{U}、速度{V}及び加速度{A}を更新することを繰り返して、この時間ステップの変位{U}、速度{V}及び加速度{A}を算出する。
(もっと読む)
非線形構造解析計算装置、非線形構造解析計算方法及び非線形構造解析計算プログラム

【課題】非線形構造体の解析を効率的に計算するための非線形構造解析計算装置、非線形構造解析計算方法及び非線形構造解析計算プログラムを提供する。
【解決手段】挙動解析装置20の制御部21は、縁付きブロック対角行列の縁部分を除いた各ブロック対角行列について、時間ステップのループ外でLU分解処理を実行して、下三角行列及び上三角行列を算出する。制御部21は、時間ステップのループ内で、接触がある場合には、接触条件を満足する縁部分の行列の生成処理を実行する。制御部21は、生成した縁部分の行列のLU分解による要素l(i),u(i)を特定し、下三角行列及び上三角行列のそれぞれと合成して、処理対象の行列を生成する。制御部21は、処理対象の行列から、前進代入、後退代入を用いて速度修正量を算出し、変位{U}、速度{V}及び加速度{A}を更新することを繰り返して、この時間ステップの変位{U}、速度{V}及び加速度{A}を算出する。
(もっと読む)
線形システム解法のためのアレイ処理
【課題】本発明は、線形システムを解くためのアレイ処理の方法を提供する。
【解決手段】線形システムを解くためにPE(54〜54N)を利用する。本発明の一実施形態(図3b)では、コレスキーファクタを判定するため、行列の対角要素がスカラーPEに射影される。別の実施形態では、コレスキーファクタを判定するため、2次元スカラーアレイが使用される。限られたバンド幅をもつ行列の場合、使用するプロセッサの数を減らした、プロセッサ(54〜54N)を用いることができる。
(もっと読む)
ordering生成方法、プログラム及び共有メモリ型スカラ並列計算機
【課題】スパースな正値対称行列のコレスキーあるいは修正コレスキー分解を行う場合に、並列処理を高速化することができるorderingを生成する方法を提供する。
【解決手段】共有メモリ型並列計算機を用いてスパースな正値対称行列のコレスキー分解あるいは修正コレスキー分解を行うにあたり、スパース行列が表す連立1次方程式が提示する問題における離散化された空間を、再帰的に2つの分割領域と、その間にある分割面とに分割する。分割を、分割面を構成するノードの数がスーパーノードの幅程度となったら止める。そして、再帰的に2分割されるごとに、分割領域内のノードに、分割面から遠いほうから順に番号付けを行う。分割面内のノードは、再帰的2分割のたびに、分割領域の番号付けの後に番号付けを行う。
(もっと読む)
並列有限要素計算システム
【課題】CGCG法を発展させることで,より短時間で解が求まる並列有限要素計算システムを提供する。
【解決手段】解析対象領域Ωと,そのメッシュ分割を与える。並列プロセス数m0,階層数νおよび各階層の領域数νmνを入力する。並列プロセスにわたる第0階層領域分割を生成する。ν個の階層の領域分割を生成する。全ν階層の領域分割をもとに第1,…,ν世代コース空間W(1),…,W(ν)と,W(ν)の共役空間V(ν)を作る。全世代の2組の剛性行列と2組の外力ベクトルを作る。ν個のコース空間の方程式を直接法で解く。第ν世代の共役空間の方程式を反復法(前処理付きCG法)で解く。u=u(0)=w(1)+…+w(ν)+u(ν)によって解を与える。この方法は,最初に「領域分割」を全部与えておき直列に計算する方法である。領域分割を「共役空間」における反復法の収束の様子を見たうえで順次与え,つぎつぎと計算していく方法も本発明に含まれる。
(もっと読む)
連立代数方程式の係数に対する許容誤差限界評価装置、方法、プログラム
【課題】連立方程式~f(x,y)=~g(x,y)=0が可解であることを保証する許容誤差限界を下から評価する技術を提供する。
【解決手段】体K上の二変数多項式f(x,y),g(x,y)∈K[x,y]を以下のように書く。f(x,y) = ad(y)xd + … + a1(y)x + a0(y),g(x,y) = be(y)xe + … + b1(y)x + b0(y)。ただし、ad(y), be(y)は定数0ではないとする。このとき、条件1[ad(y)とbe(y)が共通零点を持たない]および条件2[Resx(f,g)が定数ではない]を共に満たすならば、f(x,y)=g(x,y)=0には(複素数体上に)解が存在する。Resx(f,g)はf(x,y)とg(x,y)のxに関する終結式である。この証明された事実を係数に誤差を含む二変数多項式~f(x,y),~g(x,y)に適用する。
(もっと読む)
連立一次方程式の計算方法及び装置
【課題】前処理による高速化の効果が高い前処理付き反復解法を提供する。さらに、係数行列に応じて適切なパラメタを決定する工程を有し、パラメタの決定を利用者に課さない実用的な前処理付き反復解法を提供する。
【解決手段】係数行列Aを不完全三角分解して下三角行列L、及び上三角行列Uを得た後に、L及びUの対角要素と非対角要素のそれぞれにスケーリングパラメタを乗じ、下三角行列L′及び上三角行列U′を得る。L′及びU′より得られる前処理行列Mを用いて前処理付き反復解法を実行する。スケーリングパラメタを決定する工程において、係数行列Aと前処理行列Mより定義される評価関数を最小にするスケーリングパラメタを推定する。評価関数に係数行列Aと前記前処理行列Mの差行列の列毎の和を成分とするベクトル
のユークリッドノルムを用いる。
(もっと読む)
信号を決定する装置および手法
【課題】テプリッツ行列、またはブロックテプリッツ行列を係数行列とする連立方程式の求解効率を大幅に上げる。
【解決手段】初期連立方程式を、巡回または近似的に巡回である行列の積に分離し、次数を縮小した多数の連立方程式に分離した後で、次数が少なくなった連立方程式の解をもとに初期連立方程式の解を計算する。
(もっと読む)
スパースな正値対象行列の連立1次方程式の演算処理方法、装置、プログラム
【課題】スパースな正値対象行列の連立1次方程式の解を求める並列計算時にメモリアクセスが同じメモリ格納領域に集中しないようにする。
【解決手段】分岐ノード集合検出部101は、エリミネーションツリーをルートノードからサーチし、並列レベル毎の分岐ノード集合を検出する。メモリ割付チェイン生成部102は、同じ並列レベルのサブツリーと、サブツリーを構成せずかつレベルが近接し並列計算される可能性の高いノード群に、それぞれ異なるメモリ格納領域を割り付ける。タスクチェイン生成部103は、複数のスレッドがサブツリー単位で構成するノード群を選択して演算処理を実行し、サブツリーを構成しないノードをリーフ側から順次選択して演算処理を実行タスクチェインを生成する。LDL^T分解実行部104は、タスクチェインに基づいて複数のスレッドに各ノードの演算処理の実行時に、前述のノード毎に割り付けられたメモリ格納領域を使用する。
(もっと読む)
連立1次方程式を処理するための装置およびコンピュータ・プログラム
【課題】 Ax=bを満たすnx1のベクトルxに対応するnの高精度データ要素を生成するための、装置およびコンピュータ・プログラムを提供することであって、この式で、Aは、nxnの事前に定義された高精度データ要素に対応する正定値対称nxn行列であり、bは、nの事前に定義された高精度データ要素に対応するnx1ベクトルである。
【解決手段】 装置(1)は、行列Aおよびベクトルbのデータ要素を定義する入力データを格納するための、メモリ(3)と、制御論理(2)とを備える。第1の処理ステップ(a)で、制御論理(2)は、Alxl=blを満たすnx1のベクトルxlに対応するnの低精度データ要素を入力データから生成するための第1の反復プロセスを実施する。この式で、Alは、低精度の行列Aのnxnデータ要素に対応するnxn行列であり、blは、低精度のベクトルbのnx1データ要素に対応するnx1ベクトルである。制御論理(2)は第1の収束条件発生時に第1の反復プロセスを終了する。ステップ(b)で、制御論理は、現行の解ベクトルxを取得するために、ベクトルxlのデータ要素を高精度データ要素に変換する。ステップ(c)で、制御論理(2)は、ベクトルbとベクトル積Axとの間の差に依存して、nx1の修正ベクトルに対応するnの低精度データ要素を生成するための第2の反復プロセスを実施する。制御論理(2)は第2の収束条件発生時に第2の反復プロセスを終了する。ステップ(d)で、制御論理(2)は、修正ベクトルのnの低精度データ要素から、nx1の更新ベクトルuのそれぞれの高精度データ要素を生成し、その後ステップ(e)で、x=x+uとなるように、現行の解ベクトルxのデータ要素を更新する。制御論理(2)は、第3の収束条件が発生するまでステップ(c)から(e)を実行する。
(もっと読む)
1 - 10 / 38
[ Back to top ]