
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
991 - 1,000 / 25,978
画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラム
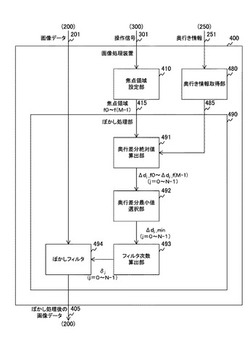
【課題】複数の焦点領域を設定する場合に、自然な遠近感が表現された画像を生成する。
【解決手段】焦点領域設定部が、被写体が撮像された画像において焦点が合っている状態を維持すべき複数の領域のそれぞれを焦点領域として設定する。奥行き取得部が、被写体までの奥行きを画像内の画素に対応付けて取得する。ぼかし処理部が、画像内のそれぞれの画素を対象画素として当該対象画素に対応する前記奥行きとそれぞれの焦点領域に対応する奥行きとの間のそれぞれの差分の絶対値のうちの最小値に応じた度合いのぼかし処理を前記対象画素に対して実行する。
(もっと読む)
画像読取装置及びこれを備えた画像形成装置

【課題】高光量のLED光源からライトガイドへの熱伝達をコストアップを招くことなく簡単な構成で抑制してライトガイドの温度上昇を抑えることができる画像読取装置を提供すること。
【解決手段】主走査方向一端に配置されたLED光源6と、該LED光源6に対向する入射面7aから入射する光を主走査方向に導く透明なライトガイド7によるサイドライト方式によって原稿を照射してその画像を読み取る画像読取装置において、前記LED光源6と前記ライトガイド7の入射面7aとの間に中空の導光部材22を介設する。又、前記ライトガイド7から漏れた光を主走査方向全域に亘って集光する集光部材23を設ける。
(もっと読む)
画像読取装置
【課題】キャリブレーションを行う際の外乱光の影響を低減することが可能な画像読取装置を提供する。
【解決手段】検出部5は、主走査方向に検出素子51を複数備え、主走査方向に直交する副走査方向82に移動可能である。検出部5に対向して、原稿台3と板部4が設けられている。板部4は、基準部材41等を備えている。原稿台3と基準部材41とは、副走査方向82において重ならない。基準部材41は、シート43とシート43の上側に配置された遮光部42とを備えている。シート43の底面は、キャリブレーション用の基準色を含む第一面44である。第一面44の高さ位置は、原稿台3の原稿接触面31の高さ位置より検出部5側である。検出部5と基準部材41との間の第一層7は、原稿台3より屈折率が小さい層である。
(もっと読む)
画像読取装置
【課題】結露除去に最低限必要な光源のみを点灯させることで、電力の無駄な消費を防止することが可能な画像読取装置を提供すること。
【解決手段】
制御部50は、電源投入直後の内部温度T2が露点温度T1以下の場合にLED31を全点灯する(S7)。その後、各位置Pnの受光量を示す受光データ40Aが取得され、時間Twの経過後に再び受光データ40Bが取得される(S8〜S10)。そして、これら受光データの差ΔD2(Pn)が算出された後に、差ΔD2(Pn)が閾値以下であるか否かが判定され(S11、S12)、閾値以下の場合は、位置Pnに対応するLED31が消灯される(S13)。これらの処理は、全てのLED31が消灯されるまで繰り返される。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
画像読取装置及び画像形成装置
【課題】光源が経年劣化した場合であっても速やかに且つ的確に結露の発生を判定する。
【解決手段】画像読取装置に、透明部材と光源と原稿の画像を複数の画素として読み取る画像読取部と主走査又は副走査方向の何れか一方向に互いに隣接して透明部材の一部に配設され反射率の異なる第一及び第二結露判断部材とを備え、第一・第二結露判断部材の境界線の近傍で第一・第二結露判断部材を読み取らせた第一・第二隣接画素の画素値を第一・第二隣接画素値とし、境界線から第一・第二隣接画素より離れた位置で読み取らせた第一・第二離間画素の画素値を第一・第二離間画素値とし、第一・第二隣接画素値間の差(隣接画素差分値)と第一・第二離間画素値間の差(離間画素差分値)の間の差異の大きさが予め定められた差異の大きさよりも大きいことを示すとき透明部材における境界線に結露が発生していると判定する。
(もっと読む)
レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置
【課題】レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置。
【解決手段】本発明は撮像素子の特性に起因するレンズシェーディングを補正するための補正ファクタを算出する方法を提示するが、従来の方法よりメモリ使用量が顕著に減少した方法を提示する。本発明によれば、基準画像を撮影し、撮影された基準画像に対してレンズシェーディングパターンの特性を利用して補正ファクタを算出するか、指数スプライン関数を用いて画素値分布を近似化して近似化された画素値分布を用いて補正ファクタを算出する。また、本発明は算出された補正ファクタを用いてレンズシェーディングを補正する方法及び装置を提供する。
(もっと読む)
画像読み取り装置、画像形成装置、画像読み取り方法及び画像読み取りプログラム
【課題】本発明は、副走査方向に移動するキャリッジに搭載されている複数のイメージセンサアレイで読み取って繋ぎ合わせた原稿の画像の画像品質を向上させる。
【解決手段】画像読み取り装置1は、複数のCCD11a、11b、ミラー13a、13b〜15a、15b及びレンズ12a、12bからなる縮小光学手段及び光源等を搭載するキャリッジを副走査方向に移動させつつCCD11a、11bで読み取った原稿Gの画像を所定の繋ぎ位置で繋ぎ合わせて1ラインの画像とする場合に、該繋ぎ位置を示す位置検出線の形成されている位置検出パターン部材4を読み取って、該位置検出線の画像から各CCD11a、11bの読み取った原稿Gの画像の繋ぎ位置を補正する。
(もっと読む)
拡張RGB空間へのトーンマッピングを用いた高ダイナミックレンジ画像の処理方法
【課題】印刷用の高ダイナミックレンジ(HDR)画像の処理方法を提供する。
【解決手段】先ず、入力画像にトーンマッピングを適用することにより、表色値をスケーリングすることもクリッピングすることなく、元の色空間から拡張RGB空間にマッピングする。その後、表色値はJabのようなデバイス非依存の色空間の表色値に変換され、その空間においてスケーリングされる(正規化される)。その後、Jab空間において画像ベースのガマットマッピングを実行することにより、入力画像のガマットを目標デバイスのガマットにマッピングする。その後、表色値は目標デバイス(例えばプリンター)の色空間に変換されて出力される。
(もっと読む)
撮像装置
【課題】距離情報を用いた画像処理の結果を短時間で取得する。
【解決手段】撮像装置は、共通の被写体の撮影を行う2つの撮像部を備える。メイン撮像部における撮影構図の確定後、サブ撮像部においてフォーカスレンズの位置を所定量ずつずらしながら高フレームレートにて連続撮影を行うことで焦点位置の異なる複数のサブ画像を取得し、複数のサブ画像の画像信号に基づき各被写体の被写体距離を表す距離情報を生成する。距離情報の生成後又は距離情報の生成と並行して、メイン撮像部においてパンフォーカスを用い、メイン画像を撮影する。画像処理部は、距離情報を用いてメイン画像の合焦状態を調整することにより目標結果画像を生成する。
(もっと読む)
991 - 1,000 / 25,978
[ Back to top ]