
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
1,041 - 1,050 / 25,978
駐車支援装置および駐車支援方法
【課題】自車両を駐車可能な駐車枠をユーザに適切に提示できる駐車支援装置を提供すること。
【解決手段】自車両周囲の画像から変換した俯瞰画像内に含まれる、路面上に描画された線状のロードマークを検出し、前記線状のロードマークが複数検出された場合に、複数の前記線状のロードマークのそれぞれについて、検出された他の線状のロードマークに対する平行度を算出し、前記平行度算出手段により算出された平行度が所定の閾値以上である場合に、前記俯瞰画像中に、自車両が駐車可能な駐車枠が存在していると判断する際において、前記線状のロードマークの前記俯瞰画像中における存在位置に応じて、前記閾値を変更する駐車支援装置。
(もっと読む)
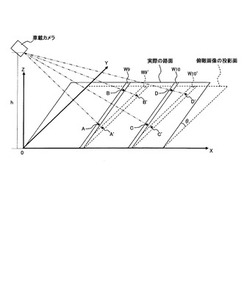
カメラキャリブレーション装置

【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
ひび割れ検出方法
【課題】撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供すること。
【解決手段】ウェーブレット画像を作成するステップ、注目画素のウェーブレット係数が閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成するステップ、残りのノイズを除去してひび割れ画像を作成するステップ、細線化処理を実行して細線化画像を作成し、ひび割れ幅を推定するステップ、からなるひび割れ検出方法である。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
塗布状態検査装置及び方法並びにプログラム
【課題】塗布全体にわたって異常を検出でき、シール剤に発生した切れ目に限らず、終端部における糸引き等、他の要因による塗布の異常を検出することができ、また、基準ワークを撮影するだけで、自動的に分岐点と端点とをカウントすることができ、容易に部品形状の変更に対応することができる塗布状態検査装置を提供する。
【解決手段】シール剤Sが塗布されたワークWを撮像する撮像装置2と、撮像装置2によって撮像された撮影画像から、シール剤Sの塗布軌跡を抽出する軌跡抽出部4−1と、正常品の分岐点の個数と端点の個数とを記憶する記憶部5と、塗布軌跡の分岐点の個数と端点の個数とをカウントし、記憶部5に記憶されている正常品の分岐点の個数と端点の個数と比較し、双方が一致する場合に塗布軌跡が正常であると判定し、双方が一致しない場合に塗布軌跡が異常であると判定する画像判定部4−2とを備える。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
撮像装置、撮像方法、部品実装装置および印刷装置
【課題】撮像対象物のサイズに影響されることなく、高分解能で撮像対象物を撮像する。
【解決手段】複数のラインカメラモジュール110を備え、複数のラインカメラモジュール110の各々は、ラインセンサ121を含むラインカメラ120と、ラインセンサ121の長手方向に対して交差する方向であって、かつラインカメラ120の側方に配置され、ラインカメラ120の撮像領域に光を投影する照明装置130とを有し、隣接するラインカメラモジュール110との間でラインセンサ121の撮像領域が長手方向に連続するよう、ラインセンサ121の長手方向に対して交差する方向において、隣接するラインカメラモジュール110と重なり合いを有するように配置されている。
(もっと読む)
区画線認識装置、区画線認識方法、プログラム及び媒体
【課題】より適切な警報を行ってドライバに自車両を自車線の中央を維持する走行を適切に促すことができる区画線認識装置を提供すること。
【解決手段】本発明による区画線認識装置1は、車両の前方の路面を含んで撮像する撮像手段2と、撮像手段2の出力する画像情報から路面内のエッジ点を抽出するエッジ点抽出手段3aと、エッジ点から区画線に相当する可能性を有する線分群を抽出する線分抽出手段3bと、線分群から区画線に相当する線分を検出する検出手段3cと、を含み、検出手段3cによる検出が所定未検出回数N以上なされない場合に、所定再検出回数M以上連続して、検出手段3cによる検出がされた場合に、検出を確定する確定手段3dを含むことを特徴とする。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】 データを複数範囲の何れかに分類する場合に、誤分類を抑制できる
【解決手段】 多段判定部は、複数の範囲のうちの少なくとも1つに判定対象を分類する判定を行うために、N階層(Nは2以上の整数値)の木構造の各ノードとして機能する各判定機を有する多段判定部を備え、各判定機は、判定対象を、2つの範囲のうちの何れか一方に分類する判定を行い、各判定機において判定される2つの範囲には、重複する部分が含まれている。本技術は、データを分類する情報処理装置に適用することができる。
(もっと読む)
生体情報処理装置、生体情報処理方法、および生体情報処理プログラム
【課題】静脈を生体情報として利用する場合において、被写体が生体であるか否かを精度よく判別することができる、生体情報処理装置、生体情報処理方法、および生体情報処理プログラムを提供する。
【解決手段】生体情報処理装置は、撮影によって被写体から静脈情報を取得する取得手段105と、被写体に外圧が印加されているか否かを検知する検知手段60と、検知手段が被写体に外圧が印加されていると検知した際の静脈情報に応じて、被写体が生体であるか否かを判定する判定手段70と、を備える。
(もっと読む)
1,041 - 1,050 / 25,978
[ Back to top ]