
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
81 - 90 / 25,978
画像処理装置、および画像処理方法、並びにプログラム
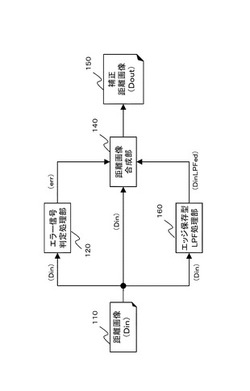
【課題】距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法を提供する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
(もっと読む)
画像再生装置、画像再生方法及びデータ構造

【課題】画像の提供者が視聴者に対して3次元上の所望の位置に画像を配置して視聴させることができる。
【解決手段】実施形態の画像再生装置は、表示手段の表示面に対する視聴者の視点位置を取得し、表示する画像と、その画像を視聴者に表示する際の、視聴者に対する画像の3次元上の配置位置を示す配置情報とを含む画像データを取得し、取得された視聴者の視点位置と、取得された配置位置とをもとに、配置位置に取得された画像が表示されるように、取得された画像の画素に対応する表示面上の画素値を算出し、算出された画素値をもとに、取得された画像を表示手段に表示させる。
(もっと読む)
衝突検出装置
【課題】路上に存在する障害物を迅速かつ適切に識別することができる衝突検出装置を提供する。
【解決手段】車両Aに搭載された、車両前方を撮影する撮影手段10と、撮影手段10によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段20と、を備えており、路上対象物検出手段20は、撮影手段10によって撮影された画像に基づいて、対象物から車両Aまでの間隔を算出する距離算出部21と、撮影手段10によって撮影された画像において、対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部22と、間隔が所定の距離となっている対象物について、判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部23と、を備えている。
(もっと読む)
個人画像データ取得装置及び個人画像データ取得方法
【課題】ユーザ(登録者)に負担を掛けることなく、認識精度の低下を改善することができる個人画像データ取得装置を提供することである。
【解決手段】個人画像データ取得装置は、表示制御手段と、表示手段と、取得手段とを備える。前記表示制御手段は、複数の表示制御設定に基づき表示を制御する。前記表示手段は、表示制御に基づき複数の表示状態に変化する。前記取得手段は、前記複数の表示状態に対応して複数の個人画像データを取得する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】人物の情報を得ることに対する関心度に応じた量の情報を提示する。
【解決手段】人物認識部102は、撮影された画像データに含まれる人物を認識する。関心度推定部107は、人物認識部102による認識結果に基づいて、情報を得ることに対する人物の関心度を推定する。情報取得部108は、人物に提示する対象となる情報を取得する。情報編集部109は、関心度推定部107により推定された関心度に基づいて、情報取得部108により取得された情報から人物に提示する情報を選択する。情報表示部110は、情報編集部109により選択された情報を出力させる。
(もっと読む)
情報処理装置、及びその制御方法、プログラム
【課題】 利用者の操作による、マップ上に表示される画像の位置の変更を受け付けることで、検索に用いられる各特徴量の重みを適切に変更し、類似の画像を検索すること。
【解決手段】 検索画像の複数の特徴量と検索対象画像の複数の特徴量との近似度と、複数の特徴量に対する重みを示す重み情報とに従って、マップ上に表示する位置を示す配置情報を生成し、生成された配置情報の位置に該検索対象画像を表示する。そして、ユーザの操作により、マップ上に表示された検索対象画像の位置の変更を受け付けると、当該変更を受け付けた検索対象画像の配置情報と、当該算出された近似度とに従って重み情報を生成し、該近似度と、当該生成された重み情報とに従って、検索対象画像の配置情報を再生成する。
(もっと読む)
横断歩道検出装置
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
手領域検出装置、手領域検出方法、プログラム及び記憶媒体
【課題】手領域を精度良く検出することが可能な手領域検出装置、手領域検出方法及びプログラムを提供する。
【解決手段】手領域検出装置は、入力画像に対してセグメンテーションを行うことで、手領域の候補となる複数の領域を抽出するセグメンテーション手段と、セグメンテーション手段によって抽出された領域の輪郭線上に位置する一の輪郭点と、輪郭線上に位置する他の輪郭点との距離を、輪郭線を構成する全ての輪郭点について求め、求められた距離に基づいて、セグメンテーション手段によって抽出された複数の領域の中から手領域を決定する手領域決定手段と、を備える。
(もっと読む)
デジタルコンテンツのメタデータを生成するための方法および装置
【課題】メタデータの生成が行われている最中に、すでに生成されたメタデータをレビューできるようにする、デジタルコンテンツのメタデータを生成する。
【解決手段】メタデータ生成は、複数の処理タスクに分割されて(30)、その処理タスクは、2以上の処理ノードに割り振られる(31)。2以上の処理ノードによって生成されたメタデータは、収集されて(36)、そして出力ユニット上で可視化される(36)。
(もっと読む)
画像読取装置、画像形成装置、画像読取方法
【課題】プラテンカバーを開いた状態で原稿から画像データを読み取る際にできるだけ短時間の画像読取動作で画像データにおける原稿領域を正確に判定することができる画像読取装置、画像形成装置、及び画像読取方法を提供すること。
【解決手段】副走査方向のライン数が出力解像度に対応する副走査方向のライン数の2倍である画像データを原稿から読み取る際に、その副走査方向の奇数ラインの画像データの読み取り時と偶数ラインの画像データの読み取り時とにおける光源の光量を異ならせ(図6(A))、このとき読み取られた前記奇数ラインの画像データと前記偶数ラインの画像データとの比較結果に応じて前記画像データにおける原稿領域を判定する(図6(B))。また、原稿領域外と判定された領域は白色データに置換する(図6(C))。
(もっと読む)
81 - 90 / 25,978
[ Back to top ]