
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
971 - 980 / 25,978
画像処理装置、画像処理方法及びプログラム
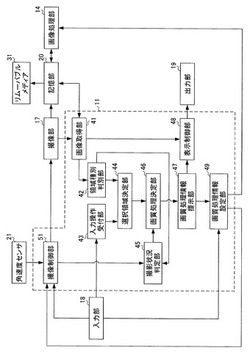
【課題】ユーザの所望する画質を簡単に設定する。
【解決手段】撮像装置1に適用される画像処理装置は、画像取得部41と、入力操作受付部43と、画質処理決定部46と、画質処理情報提示部47と、を備える。画像取得部41は画像のデータを取得する。入力操作受付部43は、画像取得部41により取得された画像のデータに対して、所定の範囲の選択操作を受け付ける。画質処理決定部46は、入力操作受付部43により受け付けられた所定の範囲に基づいて画像取得部41により取得される画像のデータに対して施される画質処理を決定する。画質処理情報提示部47は、画質処理決定部46により決定された画質処理に関する情報を提示する。
(もっと読む)
画像処理装置、画像処理方法、及び撮像装置

【課題】カラー画像を入力画像として採用した場合であっても、大規模なローパスフィルタを用いずに照明成分を精度良く抽出する。
【解決手段】照明成分抽出部61は、ローパスフィルタを用いたフィルタ処理を実行した後、ダウンサンプリングを実行する平滑処理を複数回実行して入力画像Vから解像度の異なる複数の平滑画像を生成し、低解像度側の平滑画像のエッジ部分を上層の高解像度側の平滑画像で置き換えながらアップサンプリングする逆平滑処理を複数回実行することでカラー画像である入力画像Vから照明成分Lを抽出する。
(もっと読む)
画像処理方法、画像処理装置およびプログラム
【課題】 黄色の画素の再現性を向上させたカラーモノクロ変換では、複写物に埋め込まれた不可視の黄色のセキュリティ情報が、モノクロコピーによって顕在化してしまう。
【解決手段】 原稿を読取部で読み取ることによって生成された画像であると判定された場合、前記画像をモノクロ変換した画像を記録媒体上に出力した際に、前記画像に含まれるセキュリティ情報が人間の目で識別し難いように、前記画像をモノクロ画像に変換する変換方式が設定され、設定された変換方式によって前記画像をモノクロ画像に変換する.
(もっと読む)
頭髪撮影画像のデータ処理方法およびデータ比較方法
【課題】被験者の頭髪量の定量化を可能とする客観的な頭髪撮影画像のデータ処理方法およびデータ比較方法を提供すること。
【解決手段】験者の頭上から頭頂部を含む頭部を撮影した頭髪撮影画像の処理方法であって、前記頭髪撮影画像に写る頭部の外周を決定するステップと、前記外周の内側の頭髪撮影画像を二値化して二階調画像を得るステップと、前記二階調画像を複数の部分に分割するステップと、前記分割された複数の部分毎に前記二階調画像の二値の割合を表示するステップと、を有することを特徴とする、頭髪撮影画像のデータ処理方法。
(もっと読む)
医用画像処理システム
【課題】読影効率のよい医用画像処理システムを提供すること。
【解決手段】実施形態の医用画像処理システムは、画像データを画像処理する画像処理サーバと、読影医がログインするクライアント端末を複数の前記画像処理サーバの1つに割り当てるログイン制御部と、前記ログインを契機として読影医情報と未読影検査情報を取得し前記読影医に対する読影すべき検査リストを抽出する検査リスト抽出部と、前記割り当てた画像処理サーバに前記検査リストを送信する検査リスト送信部と、前記検査リストに対応する医用画像データを前記割り当てた画像処理サーバに転送するように医用画像サーバに要求する画像要求部とを備え、前記画像処理サーバは、前記検査リストを受信する検査リスト受信部と、前記検査リストに基づく未読影の医用画像データを前記医用画像サーバから取得する画像受信部と、前記未読影の医用画像データの画像処理を行うアプリケーション実行部と、を有する。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】狭窄の診断に供する情報を生成することが可能な医用画像処理装置を提供する。
【解決手段】抽出部3は、複数のボリュームデータのそれぞれから、心臓の形態を表す第1データを抽出し、さらに、造影剤が流入した冠動脈の形態を表す第2データを抽出する。抽出部3は、第2データを利用して複数のボリュームデータのそれぞれから、冠動脈の形態を表す第3データを抽出する。解析部4は、複数の第3データのそれぞれにおける冠動脈の画素値に基づいて、冠動脈の各領域における血流速度を求める。カラーマッピング部5は、血流速度の大きさに応じた色を、冠動脈の各領域に割り当てることで色ボリュームデータを生成する。合成部6はボリュームデータと色ボリュームデータとを合成し、表示画像生成部7は合成したボリュームデータに基づいて表示用の画像データを生成する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 操作対象物に設定された第1のマーカーの面積重心に基づき、マーカー向き情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。そして、処理部110は、画像情報に基づいて、ロボット30の操作対象物に設定された第1のマーカーの認識処理を行い、第1のマーカーの認識処理の結果に基づいて、第1のマーカーに設定された第1の画像構成要素の面積重心を求め、面積重心に基づいて、第1のマーカーが示す向きを表すマーカー向き情報を求める。さらに、制御部120は、マーカー向き情報に応じてロボット30を制御する。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
印刷機上での被印刷体の処理中に被印刷体上の印刷エラーの発生を検出する方法
【課題】被印刷体を印刷機上で処理中にその被印刷体上の印刷エラーの発生を検出する方法、エキスパート・システム、及びエキスパート・システムを備えた印刷機に関する。
【解決手段】被印刷体の処理中に印刷機の動作をモニタするために印刷機の機能的構成要素に複数のセンサを取り付け、かつ被印刷体上の印刷エラーの発生につながるかつながる可能性のある印刷機の特徴的動作、または被印刷体の良好な印刷品質につながるかつながる可能性のある印刷機の特徴的動作の発生を決定するために、印刷機の動作のイン-ライン分析を行なう工程を含む方法が記載されている。印刷機の動作のイン-ライン分析には、印刷機の動作のファジー・パターン分類を行なうことが含まれることが好ましい。提案される方法の一実施形態によれば、印刷機の動作のイン-ライン分析は、被印刷体のイン-ライン光学的検査に組み合わされる。
(もっと読む)
971 - 980 / 25,978
[ Back to top ]