
国際特許分類[G06T15/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 3D[三次元]イメージレンダリング[6,2011.01] (1,787)
国際特許分類[G06T15/00]の下位に属する分類
ノンフォトリアリスティックレンダリング (3)
テクスチャマッピング (50)
レイトレーシング (14)
ボリュームレンダリング (64)
幾何学的効果[6,2011.01] (71)
照明効果[6,2011.01] (239)
国際特許分類[G06T15/00]に分類される特許
81 - 90 / 1,346
デプス補正装置及び方法
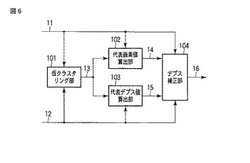
【課題】デプスマップを補正する。
【解決手段】一実施形態によれば、デプス補正装置は、補正対象画素に対応する演算範囲内の複数の画素の画素値及びデプス値の少なくとも一方についてクラスタリングを行い、演算範囲内の複数の画素を複数のクラスに分類するクラスタリング部を含む。デプス補正装置は、各クラス内の画素の画素値を用いて各クラスの画素値統計量を算出する第1の算出部と、各クラス内の画素のデプス値を用いて各クラスの代表デプス値を算出する第2の算出部とを含む。デプス補正装置は、補正対象画素の画素値及び各クラスの画素値統計量に基づいて補正対象画素の対応クラスを判定し、補正対象画素のデプス値を対応クラスの代表デプス値に置き換える補正を行う補正を含む。
(もっと読む)
オブジェクト操作装置、オブジェクト操作方法、およびオブジェクト操作プログラム

【課題】簡易な操作で操作対象オブジェクトの3次元移動の自由度を向上させる。
【解決手段】オブジェクト操作装置100は、操作対象オブジェクトを3次元移動操作する際の基準となる基準オブジェクトの周囲に設定される複数の点それぞれに対して、ローカル座標系を生成する座標系生成部110を備える。また、オブジェクト操作装置100は、座標系生成部110によって生成された複数の点それぞれのローカル座標系に基づいて、入力装置200から入力される操作対象オブジェクトの移動指令値に対応する移動先座標を算出する移動先座標算出部112を備える。また、オブジェクト操作装置100は、移動先座標算出部112によって算出された移動先座標に操作対象オブジェクトを移動させる移動処理部114を備える。
(もっと読む)
グラフィック処理装置、及び、グラフィック処理プログラム
【課題】外部メモリへのアクセス量を抑えつつ、処理量を最小限にしたグラフィック処理装置、及びグラフィック処理プログラムを提供することにある。
【解決手段】複数のブロックに分割されたフレームバッファに描画される複数のポリゴンのうち、N個を上限とするポリゴンが位置するブロックを、M個を上限とするチャンクバッファに割り当てるチャンク割り当て部と、N個のポリゴンのうちチャンクバッファに割り当てられたブロック内に位置するポリゴンの画素データを生成し前記チャンクバッファに書き込むチャンク生成部と、チャンクバッファに書き込まれた画素データを前記フレームバッファに書き出すチャンク書き出し部とを有し、各部の処理を有する処理フェーズを、複数のポリゴンについて繰り返し実行する。
(もっと読む)
均質な媒質中の光の散乱を推定する方法
【課題】環境照明から出射し、関与する均質な媒質によって散乱される光の量を推定する方法において、必要な計算時間を最小限に抑えながらレンダリング処理を改善すること。
【解決手段】球関数の同じ正規直交基底での第1の組の投影係数および第2の組の投影係数を推定するステップであって、前記第1の組は前記媒質が受け取る入射光度の関数を表し、前記第2の組は前記媒質の位相関数を表す、ステップと、前記関与する媒質によって、光の少なくとも1つの拡散方向に沿って散乱される光の量を前記第1の組の投影係数および第2の組の投影係数から推定するステップとを含む。
(もっと読む)
3次元画像生成装置
【課題】3次元画像データを生成するときの演算量を削減することができる技術を提供することを課題とする。
【解決手段】デジタルカメラ1は、複数の2次元画像データから3次元画像データ30を生成する。メモリカード20には、撮影画像データ21〜24と、撮影画像データ21〜24のそれぞれの撮影条件を示す撮影条件情報21A〜24Aが記録される。デジタルカメラ1において、空間情報生成部151は、撮影条件情報21A〜24Aを用いて、撮影画像データ21〜24の撮影空間を示す撮影空間情報21B〜24Bを生成する。使用画像選択部152は、撮影空間情報21B〜24Bに基づいて、撮影画像データ21〜23の撮影空間21D〜23Dが互いに重なることを確認する。使用画像選択部152は、撮影画像データ21〜23を、3次元画像データ30の生成に用いる使用画像データとして選択する。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】立体視表現の自由度の向上等を図れるプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムは、複数のオブジェクトが配置されるオブジェクト空間の設定処理を行うオブジェクト空間設定部と、主描画領域ARMと、主描画領域ARMの周囲に設定される周囲描画領域ARPの設定処理を行う描画領域設定部と、複数のオブジェクトのうちの第1のオブジェクトOB1については、主描画領域ARMが描画領域に設定される描画処理を行い、複数のオブジェクトのうちの第2のオブジェクトOB2については、主描画領域ARM及び周囲描画領域ARPの全体が描画領域に設定される描画処理を行って、立体視用画像を生成する画像生成部を含む。
(もっと読む)
画像処理装置、画像処理装置の制御方法、及びプログラム
【課題】キャラクタの毛髪の描写のリアリティを向上すること。
【解決手段】画像処理装置(10)は、キャラクタを表すキャラクタオブジェクト(44)が配置された3次元空間を所与の視点(46)から見た画像を表示手段(32)に表示する。方向情報取得部(82)は、キャラクタオブジェクト(44)のうちキャラクタの頭部を表すオブジェクト(60)の各点に対応する法線方向に関する情報と、視点(46)の視線方向に関する情報と、を取得する。表示手段(32)に表示されるキャラクタの頭部を表すオブジェクトの各点の色は、毛髪の色と前記頭皮の色とが混合されてなる色である。表示制御部(86)は、表示手段(32)に表示されるキャラクタの頭部を表すオブジェクトの各点の色を、当該点に対応する法線方向と、視線方向と、のなす角が180度に近いほど、毛髪の色の混合比率が小さくなり、かつ、頭皮の色の混合比率が大きくなるように変化させる。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】遠景オブジェクトについての好適な立体視用画像を生成できるプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムは、遠景オブジェクトの描画処理を行って遠景画像を生成する遠景画像生成部と、遠景画像がマッピングされた遠景マッピング用オブジェクトと、近景オブジェクトの描画処理を行って、立体視用画像を生成する画像生成部を含む。遠景画像生成部は、遠景境界面よりも奥側に位置する遠景オブジェクトを描画することで、オブジェクト空間内において遠景用仮想カメラから見える前記遠景画像を生成する。
(もっと読む)
デプスエンジンの動的な再配置を用いたグラフィックシステム
【課題】デプスエンジンの動的な再配置を用いたグラフィックシステムを提供する。
【解決手段】グラフィックシステムは、グラフィック画像を処理するように構成された複数のユニットと、選択値に基づいて2つのユニットのうちの1つから選択されたデータを受信し、処理するように構成されたデプスエンジンとを備えるグラフィックプロセッサを含む。
(もっと読む)
シミュレーション装置、該プログラム、及び該方法
【課題】パーティクルの3次元的な挙動を追跡することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、流体の流れについてのシミュレーションにより算出されるパーティクルの時間毎の物理量に関するシミュレーション結果情報に基づいて、各位置におけるパーティクルの速度を算出する速度算出部と、パーティクルの位置に基づいて、2つのパーティクル間の距離を算出し、パーティクルの速度に基づいて、2つのパーティクル間の速度差を算出し、パーティクル間の距離の値が第1の閾値より小さく、かつパーティクル間の速度差の値が第2の閾値より小さい場合、2つのパーティクルを群化する群化部と、群化された2つのパーティクルの速度ベクトルに基づいて、群化された2つのパーティクルを可視化する表示オブジェクトを描画する描画情報を生成する描画情報生成部と、を備えることにより、上記課題の解決を図る。
(もっと読む)
81 - 90 / 1,346
[ Back to top ]