
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
11 - 20 / 558
車両周辺監視装置
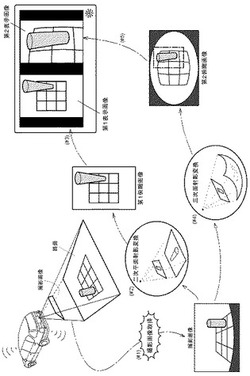
【課題】通常の俯瞰画像だけでなく、その部分拡大俯瞰画像もモニタ表示する際、それぞれの表示目的に適合した俯瞰画像が生成される車両周辺監視装置の提供。
【解決手段】車載カメラモジュールによって取得された撮影画像を元画像として二次平面射影変換によって第1俯瞰画像を生成する第1俯瞰画像生成部と、撮影画像を元画像として三次面射影変換によって第2俯瞰画像を生成する第2俯瞰画像生成部と、第1俯瞰画像からモニタ表示用の第1表示画像を生成するとともに、当該第1表示画像の所定領域に対応する第2俯瞰画像の所定領域から第1表示画像より大きな表示倍率を有するモニタ表示用の第2表示画像を生成する表示画像生成部とを備えている。
(もっと読む)
通信装置

【課題】車車間通信における通信相手の検証の信頼性を向上できる通信装置を提供する。
【解決手段】他車両の車両ナンバーを取得する車両ナンバー取得部23と、車両ナンバーから車両IDを生成する車両ID生成部12,21と、車両ID生成部12,21が自車両の車両ナンバーから生成した車両IDを通信データに加えて送信する通信部13,22と、通信部13,22が受信した通信データにおける通信相手の車両IDと、車両ナンバー取得部23が取得した車両ナンバーから車両ID生成部12,21が生成した車両IDとを比較した結果に応じて、通信データの真偽を判断する受信データ判断部24とを備える。
(もっと読む)
道路状況把握装置
【課題】太陽光の西日や日出等の影響を軽減することができる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する道路上の画像を画角が調整可能な撮像手段により撮像し、この撮像された画像に対し所定の画像処理を施すことにより前記道路の状況を判定する道路状況把握装置において、前記撮像手段により撮像された画像に太陽光等の影響による過飽和状態が生じているか否かを検出する検出手段と、この検出手段により前記撮像手段により撮像された画像に過飽和状態が生じていると検出された場合、前記撮像手段の画角を変更し、前記撮像手段により撮像された画像に過飽和状態が生じない位置に調整する画角調整手段とを具備している。
(もっと読む)
道路状況把握装置
【課題】非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
(もっと読む)
車両逆走防止システムおよび車両逆走防止方法
【課題】1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システム・方法を提供することにある。
【解決手段】本発明に関わる車両逆走防止システムは、車体sを撮影する撮影部2と、撮影部2にて撮影した画像G1から逆走車Cgの有無を判定する逆走判定部4と、撮影部2の姿勢、およびズーム、フォーカスを調整する撮影駆動部7と、逆走車Cgに逆走である旨の注意を喚起する注意喚起装置19と、注意喚起装置19に対して逆走車Cgの有無を送信する逆走出力部5と、注意喚起装置19から信号を受信する撮影入力部6とを備え、撮影入力部6が注意喚起無視の信号を受信した場合、撮影駆動部7にて撮影部2を調整し、撮影部2にて逆走車Cgを特定する画像G2を撮影している。
(もっと読む)
車両検知装置
【課題】より確実な車両の分離性能および高速車両の検出精度を確保することができる車両検知装置を提供することである。
【解決手段】実施形態に係る車両検知装置は、道路を走行する車両に対して真横あるいは真上に設置され、前記車両の少なくとも一部を重なりなく撮像する少なくとも2つのカメラからなるステレオカメラ方式の撮像部と、この撮像部の前記2つのカメラから得られる画像に対し平面投影ステレオ法による画像処理を施すことにより当該設置位置に対する前記車両の有無を検知する画像処理手段とを具備している。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
11 - 20 / 558
[ Back to top ]