
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
521 - 530 / 558
交通動態情報提示装置、及び交通動態情報提示処理プログラム等
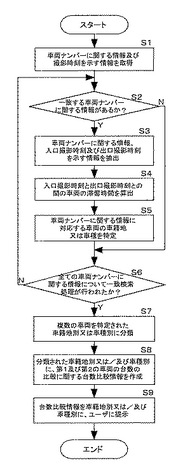
【課題】車両ナンバーに関する情報を取得し、車両の滞留時間等の交通動態の解析に利用する交通動態情報提示装置を提供する。
【解決手段】車両滞留エリアの入口付近に設置された入口撮影手段と、車両滞留エリアの出口付近に設置された出口撮影手段とによって撮影された車両のナンバープレートに関する情報を、撮影時刻とともに夫々取得し、入口情報と出口情報とを比較して互いに一致する車両ナンバー情報と撮影時刻とから個々の車両の滞留時間を算出し、複数の車両について算出された滞留時間につき、予め設定された時間より大きい滞留時間を有する第1の車両の台数と、予め設定された時間より小さい滞留時間を有する第2の車両の台数とを算出し、第1及び第2の車両の台数の比較に関する台数比較情報を作成し提示する。
(もっと読む)
カメラ式車両感知器における露光制御方法及び装置

【課題】日向と日陰が混在する画面でも、できるだけ多くの車両の識別が容易にできるようにする。
【解決手段】カメラ式車両感知器で撮影した画像の輝度のデータに基づいて、撮影対象範囲を日向又は日陰のいずれかに区分し、日向に含まれる車両の存在部分の輝度と、その周囲の輝度とのコントラストを算出し、日陰に含まれる車両の存在部分の輝度と、その周囲の輝度とのコントラストを算出し、日向、日陰のうち、コントラストが閾値より低い車両台数の多いほうの区分にあわせて、露光条件の補正を行う。
【効果】画面に写ったできるだけ多くの車両が検出できるようになり、車両識別などの後処理を正確に行うことができる。
(もっと読む)
ステレオ画像による平面推定方法
【課題】平面上から十分な特徴点が得られないような場合でも、既知マーカ等の設置なしに、高精度に平面推定を行う。
【解決手段】 平面上を移動する物体が撮像できるように設置された複数の撮像手段によってステレオ画像を撮像し、前記ステレオ画像のうちの基準画像について複数の特徴点を抽出し、抽出した各特徴点について他の画像中の対応点を探索して得られる視差から三角測量の原理により3次元座標を求め、抽出した各特徴点位置の画像に類似する画像を物体の移動前後の画像から検出し、抽出した各特徴点の3次元的な移動ベクトルから前記平面の3次元的位置を算出するようにした。
(もっと読む)
交通流監視装置
【課題】 個別車両を認識することなく、避走車両や停止車両などを効率よく検出できる交通流監視装置を得る。
【解決手段】 所定の周期で道路状態を撮像する画像撮像部10により撮像された画像がブロック分割された各ブロック毎に物体の移動方向を物体追跡部12により追跡し、一方、画像の各ブロック毎に道路形状に応じて基本物体移動方向を予め基本物体進行方向設定部11により設定しておき、物体移動方向比較部13により、基本物体移動方向と、物体追跡手段により追跡されたブロック毎の物体の移動方向とを比較して避走ブロックを設定し、この避走ブロックを避走ブロック連結処理部14により連結し、この連結された連結避走ブロック情報から避走物体判定部15により避走物体を判定する。
(もっと読む)
交通流計測方法およびその装置
【課題】 交通流計測において、車両以外のものを車両であると認識されることを回避する。
【解決手段】 ITVカメラ1によって撮影された画像に対して、空間微分、二値化、マスキング等によって選出された車頭確定点が、さらに、当該車頭確定点の周辺画像(車頭確定点として選出された点を含む領域の画像)と当該画像に対応する背景画像とが比較されることにより、当該比較結果に基づいて、確定されるか否かが決定される。具体的には、車頭確定点の周辺画像と背景画像とが予め定められた程度以上に相違していると判断されれば、当該車頭確定点は保存されるが、そうでない場合には、当該車頭確定点は、記憶から削除される。
(もっと読む)
車両感知装置
【課題】 利用するカメラの台数をより少なくしつつ、交通流の計測用の映像と肉眼で道路上の安全を監視するための映像とを出力できる車両感知装置を提供する。
【解決手段】 車両感知装置では、CPU20は、ITVカメラユニット1に、L1とL2という異なる入射光量で撮影をさせ、入射光量L1で撮影された画像については車両判別を行ない、当該車両判別の結果を、I/O23を介して外部の装置に出力している。また、CPU20は、入射光量L2で撮影された画像を、静止画像として、I/O23を介して外部の装置に出力している。つまり、CPU20は、0.2秒ごとに、車両判別の結果を外部の装置に出力し、かつ、静止画像を外部の装置に出力する。
(もっと読む)
レーダの設置情報の確認画面と調整画面の表示方法
【課題】
道路付近に設置したレーダの設置位置や設置方向の確認や調整を容易に行う。
【解決手段】
レーダの傍らにカメラを設置してレーダとカメラの相対位置と相対方向を冶具により所定値に保持しておき、カメラの画像中の所定物標を空間の座標系により点もしくは直線で定義し、所定の幾何式で計算した上記点あるいは直線の投影をカメラの画像上に描画したオーバレイ画面を合成して表示する。
オーバレイ画面中においての物標と描画物が一致していない場合、物標と描画物との表示位置が一致するように処理装置内のデータを調整するユーザインタフェース画面を表示して処理装置内のデータを調整することで、道路中と処理端末内のレーダの設置位置や設置方向が一致するよう画面上で調整できる。
(もっと読む)
物体検出装置および方法
【課題】 物体の未検知または、誤検知の発生を低減することのできる物体検出装置を提供する。
【解決手段】 ステレオカメラ101は、撮像された画像をフィードバックすることでレンズ絞りを制御できる複数の撮像装置111、112を備える。3次元情報算出部102は、ステレオカメラ101で撮像された画像から撮像空間の3次元情報を算出する。物体検出部103は、3次元情報算出部102により算出された3次元情報から撮像空間内の物体を検出する。ブルーミング判定部113、123は、ステレオカメラ101で撮像された画像からブルーミングの有無を判定する。画像加工部114、124は、ブルーミング検知部113、123の判定結果により撮像装置111、121に戻す画像を加工する。
(もっと読む)
画像処理装置
【課題】 周囲環境の変化にも対応でき、道路上の撮影画像から安定して車両抽出を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像として画像入力部21より入力された現在画像、ΔT前画像、2ΔT前画像とともに、微分画像作成部31で作成されたこれらの微分画像、背景画像作成部32で作成された背景画像を用いて、画像間減算部33及び画像間論理積演算部34により、微分背景差分、背景差分、フレーム差分、微分フレーム差分の4つの方式による特徴抽出処理を行う。そして、各方式で得られた画像を画像二値化部35で二値化した後、各方式で得られた画像に対して二値化画像重み付け部36で撮影環境に応じた重み付けを行い、画像間加算部37で加算して合成することで、特徴抽出画像を生成し、特徴画像格納部30に格納する。
(もっと読む)
画像処理装置
【課題】 道路上の撮影画像から、より精度良く車両認識を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像を基に特徴画像作成部51で作成された特徴抽出画像を垂直・水平特徴コード化部54で垂直方向及び水平方向に特徴をコード化し、この特徴抽出データについて、車幅条件の車両判定値に基づいて幅小データ等を水平特徴結合部61で結合するとともに、幅大データを幅大データ分離部62で分離して補正する。その後、車両認識部66で特徴補正データによって車尾検出、車長算出、車体確定を行う。また、背景差分画像作成部52で作成されたライト検出用の背景差分画像を用いて、ライト検出を行って車尾位置を算出する。そして、車尾確定部69において、車体解析とライト解析によるそれぞれの車尾の検出結果を統合し、車尾位置を確定する。
(もっと読む)
521 - 530 / 558
[ Back to top ]