
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
531 - 540 / 558
4次元ポイント3次元指示ライン
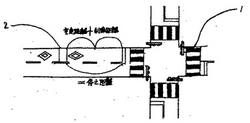
【課題】 信号機が黄色になったらブレーキをかるべき地点およびウインカーを点滅させ始めるべき地点を運転手に知らせる。また停止違反車を記録する。
【解決手段】 信号機の黄色が点灯した場合、車が通常のブレーキを掛けるべき最終地点に、最終ブレーキポイント指示ライン2および、ウインカーポイントを示すウインカーポイント指示ライン13、14を設ける。また、信号機1と速度取締装置5を連動して、1機か2機のカメラ6、7で、赤色の点灯時に、その交差点の停止位置上を、その付近では止まれないようなスピード以上で通過する車等とナンバーの写真を撮り得るようにする。
(もっと読む)
複雑な交通システム用の案内および安全システム
本発明は、乗客の自動カウント、例えば火災、犯罪およびテロリズムに対する安全監視、車両、列車等のような交通システムの個別構成要素の投入制御、乗客の走行経路および情報の自動監視が、電子技術的な基盤によって互いに結合される交通手段、特に複雑な大量交通手段用の案内および安全システムを提供する。本システムは、少なくとも1つの交通手段(14)および/または人のための少なくとも1つの案内手段(24、26、28、60)と、複数の検出ユニット(40、42、44)と、中央ユニット(20)とを含む。中央ユニット(20)は、検出ユニット(40、42、44)と、案内手段(24、26、28、60)とに結合される。検出ユニット(40、42、44)は、規定の時点に規定の空間領域に存在する人数を算出するように指定され、この結果、中央ユニット(20)は、車両の適切な数を必要な頻度で自動的に提供するために、また乗客を車両の入口に案内するために、上記の人数に応じて案内手段(60)を制御できる。  (もっと読む)
(もっと読む)
速度計測装置および速度計測方法

【課題】 1カ所に監視カメラを設置するだけで道路条件等に柔軟に対応して走行車両の速度計測が可能な速度計測装置および測定方法を提供する。
【解決手段】 ヘッド部1の中に2つのカメラ11A、11Bを各々回転台13A、13Bの上に搭載し、2つのカメラ11A、11B間の撮影方向を調整できるように設置して道路を走行する車両の監視ポイントを自由に設定できる様にする。そして監視ポイント間の走行時間を測定して走行速度を算出することにより道路条件に柔軟に対応する走行車両の速度計測装置が提供できる。
(もっと読む)
車両検知システム
【課題】 より軽量で検知精度に優れる車両検知システムを提供する。
【解決手段】 道路上の監視範囲を通過する車両を検知する車両検知システム1であり、検知対象が発する赤外線を感知するセンサ2と、このセンサ2の検知方向前方に配置される赤外線透過レンズ3と、センサ2に伝達される赤外線のうち、レンズ3を透過した赤外線以外の赤外線の量が外部環境によって変化するのを緩和する熱緩和材4とを具える。熱緩和材4は、外部環境によって放射する赤外線量が変化しにくいように熱伝導率が低い材料で形成する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】 対面通行道路において、停止車両検出を適切に行う。
【解決手段】 経時的に同一カメラにより同一方向を撮像した所定枚数の処理画像における各画素について、輝度情報の平均を算出することにより時間平均画像を作成する時間平均画像作成手段11と、前記時間平均画像の高輝度領域を抽出すると共に、抽出した高輝度領域と背景画像における対応領域の類似度判定を行って車両領域検出を行う車両領域検出手段12と、対面通行の車線毎及び前記車両領域毎に前記処理画像についてフレーム間差分及び2値化を行って得た結果における白画素割合が閾値を超えるか否かに基づき停止車両検出を行う停止車両検出手段13とを具備する。
(もっと読む)
車両検知警報装置及び車両検知警報方法
【課題】簡便な構成の装置で車両の検知を迅速に行う。
【解決手段】車両検知警報装置は、車両12が通過する路面14を含む背景を格子状の画素単位で撮像するCMOSカメラ16と、得られた撮像画像70に基づいて車両12の検知を行うコントローラ18とを有する。コントローラ18は、撮像画像70における路面14の像上の複数の略水平な検知ラインL1、L2及びL3を特定し、撮像画像70における各検知ラインL1、L2及びL3上の画素毎の輝度を基準輝度として記憶し、各検知ラインL1、L2及びL3上の画素の輝度をCMOSカメラ16から1画素毎に順次読み込み検査輝度として記憶する。次に、検査輝度と同一画素の基準輝度との差の絶対値を順次求め、検知ライン毎に絶対値の総和を求め、この総和値に基づいて車両12が走行していること及びその走行方向を検知する。
(もっと読む)
移動体情報提供サーバ、移動体情報提供方法、プログラム、情報記憶媒体
【課題】所定の移動体情報をクライアント端末に送信することができる移動体情報提供サーバを提供する。
【解決手段】移動体情報提供サーバ10は、移動体を認識する移動体認識装置20およびクライアント端末30に通信可能に接続されている。移動体情報提供サーバ10は、移動体の識別情報に対応づけて移動体情報を記憶した移動体情報データベース18aと、移動体認識装置20が認識した認識情報であって、移動体認識装置20から送信されてきた情報を受信する受信手段14aと、認識情報に基づき、移動体の識別情報を判断する識別情報判断手段12aと、識別情報判断手段12aにより判断された移動体の識別情報に基づき、移動体情報データベースから移動体情報を読み出す読出手段12bと、読出手段12bが読み出した移動体情報をクライアント端末30に送信する送信手段14bとを含む。
(もっと読む)
画像上移動物体認識方法及び装置
【課題】移動物体を高速かつより正確に認識する。
【解決手段】時系列画像の各々を複数のブロックに分割し、ブロック単位で背景画像の対応するブロックと比較して両者の非類似度を算出し、該非類似度が基準値以上であれば移動物体が該ブロックに存在すると判定する。第1段階で移動物体領域の概略をブロック単位で高速に認識し、第2段階で該領域のみについてブロック単位で修正する。第2段階での該基準値を第1段階のそれより大きくし、第2段階での該ブロックのサイズを第1段階のそれより小さくし、第2段階で孤立移動物体ブロックのをその近くの移動物体クラスタと一体化し、又は、第1段階で輝度成分のみ用い第2段階で色成分を用いる。これらのいずれかを行っても同一移動物体が分離認識される場合には、第2段階での該基準値を第1段階のそれより小さくする。
(もっと読む)
交通情報提供システム、交通情報提供方法、情報提供装置、および車載情報端末
【課題】 自車両の進行方向に応じた交差点の交通情報画像を提供すること。
【解決手段】 誘導経路上に存在する交差点で路上装置が設置されている交差点を検索する(ステップS110)。自車両が路上装置が設置されている交差点に進入する方向を判断し(ステップS120)、路上装置が設置されている全ての交差点の車両が進入する方向を撮像した交差点画像を読み込んで(ステップS130)、交差点交通情報画像を生成する(ステップS140)。生成した全交差点交通情報画像を車載情報端末へ送信する(ステップS160)。
(もっと読む)
計測システムおよび計測方法
【課題】 撮影手段の撮影条件に関するパラメータを、より容易に算出させる。
【解決手段】 計測領域内の道路上を直線的に移動ながら通過する試験車両5を、計測領域を撮影するカメラで撮影し、その試験車両5の撮影画像に基づいて、カメラの撮影条件に関するパラメータを算出するとともに、算出したパラメータを用いて車両の速度などを計測する。計測領域内の道路上を直線的に移動ながら通過する試験車両5の撮影画像を用いてパラメータを算出することができるため、予め道路上に基準物を設置する等の困難を要する作業を省くことができる。
(もっと読む)
531 - 540 / 558
[ Back to top ]