
国際特許分類[G08G1/056]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 車両の移動方向を判別する装置を持つもの (35)
国際特許分類[G08G1/056]に分類される特許
11 - 20 / 35
車両の前後進判定装置
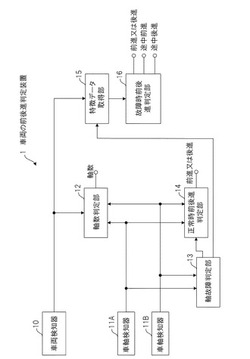
【課題】1対の投光手段と受光手段を有する1つの車両検知器で車両の前進と後進を判定することができる車両の前後進判定装置を提供する。
【解決手段】投光器10Aから発せられた光を受光する受光器10Bを有し投光器10Aから発せられた光を移動する車両が遮ることによって該車両を検知して車両検知信号を出力する車両検知器10と、車両検知器10から出力された車両検知信号から得られるシルエットパターンを用いて車両の車頭側及び車尾側の特徴データを取得する特徴データ取得部15と、特徴データ取得部15で取得された車両の車頭側及び車尾側の特徴データに基づき車両の前後進を判定する故障時前後進判定部16とを備える。これより、1対の投光器10Aと受光器10Bからなる1つの車両検知器10のみで車両の前後進を判定することができる。
(もっと読む)
交通信号制御分析装置

【課題】 交通信号制御が交通状況に応じて適切に行われているか否かを分析する交通信号制御分析装置を提供することを目的とする。
【解決手段】 待ち行列長取得手段211は、感知器情報に基づいて交差点に接続される道路上における待ち行列長を取得する。現示別待ち行列長取得手段221は、各信号現示に対応する道路上における待ち行列長の最大値を現示別待ち行列長として取得する。そして、偏渋滞判定手段231は、前記取得した現示別待ち行列長のうち、少なくとも1つの現示別待ち行列長が第一の閾値以上であって、かつ他の少なくとも1つの現示別待ち行列長が前記第一の閾値以下である第二の閾値以下となる場合に、偏渋滞有りと判定する。
(もっと読む)
交通信号制御分析装置
【課題】 交通信号制御が交通状況に応じて適切に行われているか否かを分析する交通信号制御分析装置を提供することを目的とする。
【解決手段】 待ち行列長取得手段211は、感知器情報に基づいて交差点に接続される道路上における待ち行列長を取得する。現示別待ち行列長取得手段221は、各信号現示に対応する道路上における待ち行列長の最大値を現示別待ち行列長として取得する。そして、偏渋滞判定手段231は、前記取得した現示別待ち行列長のうち、少なくとも1つの現示別待ち行列長が第一の閾値以上であって、かつ他の少なくとも1つの現示別待ち行列長が前記第一の閾値以下である第二の閾値以下となる場合に、偏渋滞有りと判定する。
(もっと読む)
合流部交通制御システム
【課題】本線と合流線とで交通量の多寡が時間によって入れ替わる現象が生じる合流部における渋滞を抑制することができる合流部交通制御システムを提供する。
【解決手段】合流部交通制御システム10は、第1路線2及び/又は第2路線3の合流部4手前の区間における交通状況を計測するための交通流センサ11と、交通状況に基づいて第1路線2及び/又は第2路線3の車線の運用形態を決定する路側処理装置16と、路側処理装置16からの指令に基づいて、合流部4の手前で第1路線2及び/又は第2路線3の車線を規制する車線規制手段(情報提供装置18、物理的車線規制装置23)と、を備える。
(もっと読む)
移動体が既定方向に移動中かどうかを決定するための方法および装置
【課題】移動体が既定方向に移動中かどうかを決定できる方法および装置を提供する。
【解決手段】位置決め手段を備えた移動体は、関与ポイントの位置と基準ポイントの位置に関する情報を含むデータを送信機から受信する。受信したデータ、つまり第一のポイントに於ける時間を単位とする移動体の第一の位置、および第二のポイントに於ける時間を単位とする移動体の第二の位置、に基づき、移動体が既定方向に移動中かどうかが決定される。好ましい形態として、移動体が既定方向に移動中かどうかを検証するために、角度情報が利用される。
(もっと読む)
交通システム
【課題】 車両の進行方向を正確に判別することのできる交通システムを提供する。
【解決手段】 交差点Aに流入する道路の車線上にビーコンヘッドを設けた上流側路上通信装置1と、その上流側路上通信装置1よりも車両進行方向下流側に下流側路上通信装置2とをそれぞれ設置する。路上処理装置3は、上流側路上通信装置1および下流側路上通信装置2と接続されており、これらが車両から受け取るアップリンク情報を受信することができる。路上処理装置3は、上流側路上通信装置1で受信したアップリンク情報に含まれる車両IDと同一の車両IDを含むアップリンク情報を所定時間内に下流側路上通信装置2でも受信したと判断される場合には、当該車両IDを有する車両が交差点Aに向かって進行しているものと判定する。
(もっと読む)
車両用逆走検出装置
【課題】簡易な構成で且つ確実に逆走を検出する車両用逆走検出装置を提供すること。
【解決手段】車両に搭載され、自車両の逆走を検出する車両用逆走検出装置に、道路に沿って非対称な規則性をもって配置された構成物(分合流標示、視線誘導標識、トンネル内照明、等)を撮像する撮像手段と、この撮像手段により撮像された上記構成物の上記規則性に基づいて、自車両が当該道路を順方向に走行しているか、或いは、逆方向に走行しているかを判定する判定手段とを備える。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
画像処理装置、画像処理プログラム、画像処理方法及びその装置を有する画像処理システム並びにその装置を有する交通情報提供システム
【課題】車両の進行方向を予め設定しなくても、道路上を走行する車両を撮像した撮像画像を処理して、効率良くかつ精度良く車両を認識する画像処理装置、プログラム及び方法を提供する。
【解決手段】画像処理装置1aは、中央線変移システム2a、2bが設置された道路11上の所定領域Rを撮像した撮像画像について、中央線変移の対象となる車線11b上の車両を認識する。あるフレームにおいて認識した車両の位置と、1つ前のフレームにおいて認識したこの車両の位置とに基づいて、この車両の走行方向を算出する。これを複数の車両について繰り返し、複数の車両の走行方向に基づいて上記車線11bにおける車両の進行方向を決定する。決定後は、現在のフレームの撮像画像の車線11bにおいて、1つ前のフレームにおいて認識した車両の位置を基準として、その進行方向に所定領域を設定し、その領域内において当該車両を認識する。
(もっと読む)
交通信号制御分析装置
【課題】 交通信号制御が交通状況に応じて適切に行われているか否かを分析する交通信号制御分析装置を提供することを目的とする。
【解決手段】 待ち行列長取得手段211は、感知器情報に基づいて交差点に接続される道路上における待ち行列長を取得する。現示別待ち行列長取得手段221は、各信号現示に対応する道路上における待ち行列長の最大値を現示別待ち行列長として取得する。そして、偏渋滞判定手段231は、前記取得した現示別待ち行列長のうち、少なくとも1つの現示別待ち行列長が第一の閾値以上であって、かつ他の少なくとも1つの現示別待ち行列長が前記第一の閾値以下である第二の閾値以下となる場合に、偏渋滞有りと判定する。
(もっと読む)
11 - 20 / 35
[ Back to top ]