
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
91 - 100 / 7,349
到達時間推定装置、到達時間推定方法、到達時間推定プログラム、及び情報提示装置
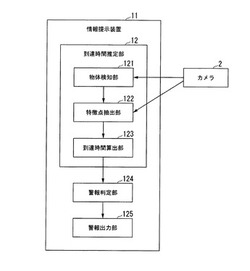
【課題】到達時間をより確実に推定することができる到達時間推定装置、到達時間推定方法、到達時間推定プログラム及び情報提示装置を提供する。
【解決手段】画像入力部は、画像信号をフレーム毎に入力し、物体検知部は、画像入力部から入力された画像信号が表す物体を検知し、到達時間算出部は、物体検知部が検知した物体までの方向を表す方向ベクトルに基づいて前記画像信号を撮影した撮影装置の光軸の回転を表す回転行列を算出し、過去の方向ベクトルに前記算出した回転行列を乗じたベクトルと、現在の方向ベクトルとに基づいて前記物体までの距離の変化を算出し、算出した距離の変化に基づいて当該物体までの到達時間を算出する。
(もっと読む)
歩行者認識装置

【課題】上半身が画像上で確認できない状況下おける歩行者の認識の精度をさらに向上させる。
【解決手段】撮像画像中の右斜めに傾いた第1特徴エッジ、左斜めに傾いた第2特徴エッジ、及び当該第1特徴エッジの上端と当該第2特徴エッジの上端とを結ぶ第3特徴エッジからなる特徴形状をもとに、撮像画像から検出した歩行者候補が歩行者であるか否かを判定して歩行者の認識を行う。
(もっと読む)
撮像ユニット
【課題】フロントガラス等の透明部材に付着した付着物と、透明部材の位置より遠方の情報とを、撮像可能な撮像ユニットを提供する。
【解決手段】光源と、撮像レンズ、光学フィルタ、及び画像センサを備え、透明部材に対して光源と同じ側に配置された撮像装置と、を有し、光学フィルタは、撮像レンズを介して入射する入射光を透過する基板と、基板の一方の側の有効撮像領域の全部に形成され、入射光のうち波長範囲λ1〜λ2及びλ3〜λ4(λ1<λ2<λ3<λ4)の光のみを透過する第1の分光フィルタ層と、基板の他方の側の有効撮像領域の一部に形成され、入射光のうち波長範囲λ5〜λ6(λ5<λ6)の光のみを透過する第2の分光フィルタ層と、を備え、照射光の波長は、波長範囲λ3〜λ4、波長範囲λ3〜λ6、波長範囲λ5〜λ4、及び波長範囲λ5〜λ6、のうち最も狭い波長範囲に包含されている。
(もっと読む)
車両衝突回避及び緩和システム
【課題】複数の車両の間の切迫した衝突によるダメージを共同で低減するためのシステム及び方法の提供。
【解決手段】複数の車両の間の切迫した衝突によるダメージを共同で低減するシステムが、感知装置、プロセッサ、メモリ、出力装置、及び通信装置を有する。感知装置は、複数の車両の近く、周囲、内部、または関連の状況を感知する。メモリは、プロセッサと電気的に通信し、プロセッサにより実行されるプログラミングコードを有する。プログラミングコードは、感知装置によって感知された感知状態を分析し、複数の車両の間の切迫した衝突によるダメージを共同で低減するために命令を複数の車両に共同で決定し出力する様に構成されている。出力装置は、共同で決定された出力命令を複数の車両に出力し、または実行する。通信装置は、感知された状態を感知装置からプロセッサに通信し、共同で決定した出力命令をプロセッサから出力装置に通信する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
車両運転支援装置
【課題】より快適に確認操作に対する報知を実施できるようにする。
【解決手段】車両周辺の状況における運転者の確認操作の監視項目を特定し、監視項目の全てに対する確認操作が実施されたか否かを判定し、監視項目の全てに対する確認操作が実施されていないと判定された場合、実施されなかった確認操作を記憶手段に記憶させ(S108)、次回、車両周辺の状況が、監視項目の全てに対する確認操作が実施されなかった状況と一致した場合、実施されなかった確認操作について運転者に報知する(S206)。
(もっと読む)
車線認識装置
【課題】車線認識の誤検出を防止する車線認識装置を提供することを課題とする。
【解決手段】自車両が走行中の車線を認識し(例えば、画像による車線認識)、認識した車線の情報(例えば、車線幅Ws)を取得し、自車両が走行中の車線の構造情報(例えば、車線幅Wm)を取得し、認識した車線の情報と取得した車線の構造情報とを比較して車線認識が誤認識か否かを判定し、車線認識が誤認識と判定した場合、自車両に対する先行車両又は/及び後続車両を認識し、先行車両又は/及び後続車両の自車両に対する横位置Xcを取得し、先行車両又は/及び後続車両の横位置Xcに基づいて車線の右側の区画線と左側の区画線のうちのいずれの側の区画線を誤認識したかを判別し、その判別結果に応じて認識した車線の情報を修正する。
(もっと読む)
レーン案内表示システム、方法およびプログラム
【課題】案内線の先端が示す推奨レーンの位置を認識しやすくする技術の提供。
【解決手段】車両の前方を撮影した前方画像を取得する前方画像取得手段と、前記前方画像において前記車両が走行すべき推奨レーンを特定するレーン特定手段と、前記車両が現在走行している位置を示す後方側端点を後方側の端点とし、前記推奨レーン内において前記後方側端点よりも前方側の位置を示す前方側端点を前方側の端点とする案内線を生成し、当該生成した前記案内線を重畳した前記前方画像を表示部に表示させる表示制御手段と、を備え、前記表示制御手段は、前記案内線を重畳した前記前方画像を連続的に更新するとともに、前記前方画像の縦方向における前記前方側端点の位置が一定に維持されるように前記案内線を生成する。
(もっと読む)
運転支援装置
【課題】2車両間で相互に協調した運転支援情報を出力する。
【解決手段】自車両Aで重要な警告度が解析された場合に、警告判断部33が送受信部37を介してその自車両解析警告度を含めた警告発信情報をその接触対象となる他車両に対して送信する。また逆に、送受信部37が近隣車両から当該自車両Aに対して送信された警告発信情報を受信した場合には、警告判断部33がその受信した警告発信情報に含まれる警告度と、自車両Aが解析した自車両解析警告度とを比較し、より接触可能性の高い方の警告度に対応した警告指示をディスプレイ12に表示させるよう判断する。これにより、自車両Aと特定の近隣車両との間で同じ程度に協調させた警告度をそれぞれほぼ同時に報知させることができ、相互に接触を回避させることができる。
(もっと読む)
車両周辺監視装置
【課題】画像から検知された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】第1表示部(26)と、第2表示部(28)と、1つのサブ領域(74、76、78)から2以上の監視対象物(H1〜H3)が検知されたか否かを判別する検知数判別部(52)とを備える。検知したと判別された場合、第2表示部(28)は、2以上の監視対象物(H1〜H3)が存在する旨を示す第1モード、及び2以上の監視対象物が存在する位置を示す第2モードに順次切り替えて各マーク(94、96、98、100)を表示する。
(もっと読む)
91 - 100 / 7,349
[ Back to top ]