
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,011 - 1,020 / 7,349
車外への音発生装置
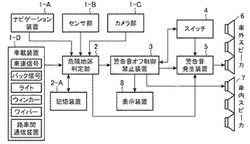
【課題】車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができる車外への音発生装置を得る。
【解決手段】走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部1−A、B、C、Dとを備え、情報取得部1−A、B、C、Dで取得された情報と記憶装置2−Aの判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、判定部2によって車両が危険地区を走行していると判定されている場合は、スイッチ部4からの制御信号にかかわらず、音発生部6の出力を停止しない制御部3とを備えた車外への音発生装置。
(もっと読む)
歩行者検出装置

【課題】本発明は、路面温度から歩行者のとりうる温度を算出するのに用いる線形関係を利用して、歩行者候補を精度良く抽出することを目的としている。
【解決手段】このため、熱画像撮像手段を備え、熱画像から歩行者を検出する歩行者検出装置において、路面領域推定手段と、推定された路面領域の温度ヒストグラムを作成し、温度ヒストグラムの最頻値を路面温度とする路面温度算出手段と、路面温度算出手段の路面温度から歩行者のとりうる温度を算出する歩行者温度算出手段と、歩行者温度算出手段の歩行者温度に基づいて熱画像から歩行者候補を抽出する歩行者候補抽出手段と、歩行者候補抽出手段により抽出された各歩行者候補について非歩行者であるか否かを判定し、非歩行者を除外する非歩行者判定手段と、非歩行者判定手段により非歩行者を除外された残りの各歩行者候補について歩行者か否かを判定する歩行者判定手段とを備える。
(もっと読む)
安全確認装置
【課題】車両運転中、左右前柱によって生じる死角による、周りの安全確認の見落しに伴って発生する、歩行者を巻き込む事故を未然に防ぐ安全確認装置を提供する。
【解決手段】左右前柱12の外側で運転者の目線の通る位置に、死角範囲内を撮影するデジタルカメラの対物レンズで撮影する手段と、車内ディスプレイ液晶画面16で影像を表示する手段と、起動用電源であるヒューズボックス38と起動制御手元スイッチ18を備え、対物レンズと、ディスプレイ画面16と、起動用制御スイッチ18をリード線20でつなぎ、左右の死角範囲内を影像表示する。
(もっと読む)
運転支援装置
【課題】死角に対する注意喚起等の機能を向上して安全性を向上する。
【解決手段】レーザレーダ2により自車周辺の障害物を検出し、自車進路推定部7により自車1の進路を予測し、出された障害物による死角を死角推定部8により推定し、死角の注意度設定部9により、推定された死角のうちの自車1の進路に近い側ほど注意度合いを高く設定して表示部12に表示して安全性を向上する。
(もっと読む)
車両制御システム、車両制御装置、及び、車両制御方法
【課題】合流車線において自車線に進入する他車両に対して、自車両が適切な車両制御を行うことを目的とする技術を提供する。
【解決手段】車両が走行する車線に合流する合流車線を検出し、合流車線に存在する物体を検出する。そして、合流車線に存在する物体を検出した場合に、この物体をACCの制御対象、及び、PCSの制御対象のいずれか一つに設定する。これにより、合流車線から自車線に進入する物体を自車線に進入する前に制御対象とできる。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
直線検知装置
【課題】解像度を劣化させることなく計算量を低減することができ、しかも、左右の対称性を維持することができる直線検知装置を提供する。
【解決手段】画像のXY平面から複数の候補点を抽出する候補点抽出部2と、XY平面に置かれた原点を基準に各候補点をハフ変換する候補点ハフ変換部3と、ハフ変換で得られた各正弦波に従いθρ平面としてメモリ上に確保された二次元配列の配列要素に投票する配列投票部4と、投票値が閾値を超える配列要素からXY平面上の直線を検知する直線検知部5と、検知された複数の直線から消失点を推定する消失点推定部6と、消失点に画像の原点を置き直す消失点原点化部7とを備える。
(もっと読む)
車両接近報知システム
【課題】車両と歩行者が接近したり衝突の危険があったりする場合に、車両方向が分かりやすいように歩行者に対して情報提供する。
【解決手段】車両接近報知システムは、歩行者の位置情報を取得可能な歩行者端末と、車両の位置情報および走行情報を取得可能な車載端末と、から構成され、歩行者の位置情報と車両の位置情報および走行情報とに基づいて、車両と歩行者が接近または衝突する危険がある場合に、車載端末が歩行者に対して警報を発する。警報の種類を歩行者端末から指定することや、警報の音量を周囲の騒音レベルに応じて決定することも好ましい。接近や衝突の判定は、車載端末で行っても良いし、歩行者端末で行ってもよく、また、第3の装置で行っても良い。
(もっと読む)
物体検知装置
【課題】 物体検知手段で検知した物体が、そのまま跨いで走行しても特に支障のない物体であるか、接触を回避する必要がある物体であるかを早期に識別できるようにする。
【解決手段】 送信手段が送信した電波の物体による反射波を受信する受信手段の受信強度をフーリエ変換し、その周波数成分の周波数を第1閾値と比較し、かつ前記周波数成分のパワースペクトルを第2閾値と比較する。自車の走行に対して支障がある停止した先行車からの反射波は受信強度が細かく増減するため、その受信強度をフーリエ変換した周波数成分は、周波数が第1閾値よりも大きく、かつパワースペクトルが第2閾値よりも大きくなることがあり、これにより先行車を判定することができる。この判定は自車から先行車までの距離が大きい状態でも可能であるため、障害物を早期に発見して回避操作を的確に行うことができる。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
1,011 - 1,020 / 7,349
[ Back to top ]