
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,111 - 1,120 / 7,349
右折時走行支援装置、右折時走行支援方法
【課題】右折時における注意喚起のタイミングや注意喚起の度合を、運転者の感覚に近づける。
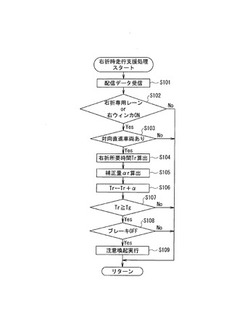
【解決手段】自車両が右折する際に(S102の判定が“Yes”)、対向直進車両が存在しなければ(S103の判定が“No”)、注意喚起は行わない。一方、対向直進車両が存在するときには(S103の判定が“Yes”)、自車両の右折が完了するまでの右折所要時間Trを算出し(S104)、右折所要時間TrがDSRCビーコン15から配信された対向直進車両の到達所要時間Tg以上であるときには(S105の判定が“Yes”)、対向直進車両と干渉する可能性があるため、運転者に対する注意喚起を行う(S107)。このとき、運転者に注意喚起を行うタイミング又は注意喚起の度合を、対向直進車両の車種に応じて設定する(S105、S106)。
(もっと読む)
車両制御装置

【課題】自車両の車速制限制御の解除要否を状況に応じて適切に判断することができる車両制御装置を提供する。
【解決手段】車両制御装置のECUは、自車両の減速支援を開始した後、後方物体センサの検出信号に基づいて後方車両が自車両に接近中であるかどうかを判定し、後方車両が自車両に接近中でないと判定されると、自車両の減速支援を解除するための解除閾値を高い値に設定し、後方車両が自車両に接近中であると判定されると、解除閾値を低い値に設定する。そして、ECUは、アクセル開度センサの検出信号に基づいて自車両のアクセル開度の絶対値または変化量を取得し、アクセル開度の絶対値または変化量が解除閾値よりも大きいと判定されたときは、自車両の減速支援を解除する。
(もっと読む)
衝突時間算出装置、衝突時間算出方法及びプログラム
【課題】適切なタイミングで、ドライバーに警報を発する。
【解決手段】自車に接近する接近車両についてのオプティカルフローを用いて、接近車両が、自車に搭載された撮影装置20の光学中心を含む面に到達するまでの到達時間を算出する。そして、この到達時間に基づいて、接近車両が自車に衝突するまでの衝突予測時間を算出する。この衝突予測時間は、接近車両が自車から離れていても、接近車両の移動軌跡を示すベクトルの大きさと、オプティカルフローの大きさとの間に生じる誤差の影響を大きく受けることなく算出される。したがって、事前に自車と接近車両とが衝突するまでの衝突予測時間を算出することで、適切なタイミングで、ドライバーに衝突を回避するための警報を発することが可能となる。
(もっと読む)
右折時走行支援装置、右折時走行支援方法
【課題】右折時における不必要な注意喚起を抑制する。
【解決手段】自車両が右折する際に(S102の判定が“Yes”)、対向直進車両が存在しなければ(S103の判定が“No”)、注意喚起は行わない。一方、対向直進車両が存在するときには(S103の判定が“Yes”)、自車両の右折が完了するまでの右折所要時間Trを算出し(S104)、右折所要時間TrがDSRCビーコン15から配信された対向直進車両の到達所要時間Tg以上であるときには(S105の判定が“Yes”)、対向直進車両と干渉する可能性があるため、運転者に対する注意喚起を行う(S107)。但し、運転者のブレーキがONであれば(S106の判定が“No”)、自車両が右折を開始していないと判断し、注意喚起を制限する。
(もっと読む)
車両の右折時走行支援装置及び右折時走行支援方法
【課題】右折先の横断歩道に位置する歩行者の存在に対する注意喚起の適切化を図ることを目的としている。
【解決手段】交差点における自車両MMの右折先に位置する横断歩道W1を横断する歩行者Zのうち、自車両MMの運転者が視認していると推定される視野領域SAの外に存在する歩行者Zを検出すると、運転者に注意喚起を行う。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】運転者が車両40を運転して道路61から道路60に進入して右折するために、車両40を交差点80に進入させようとして停止線65で停止しているとき、撮像手段1で撮像した車両前方画像51には、道路60の左右方向がほぼ180°にわたって表示される。従って、運転者が目視した場合に死角となる領域(視線64より左側の領域)も運転支援画像70に表示されるため、運転者が交差点80に接近してくる車両41を把握できるとともに、運転支援画像70に表示されている左側車幅表示線72aと左側第1距離目盛線71aおよび左側第2距離目盛線71cとを見ることによって、車両41と交差点80との距離を把握することができる。
(もっと読む)
車両の進行路推定装置
【課題】ヨーレートセンサを用いることなく、言い換えれば車両の前方の物体を検知する物体検知手段のみを用いて、自車両の進行路の推定精度を向上させる。
【解決手段】車両に搭載され、該車両の前方の物体を検知する物体検知手段と、検知された物体が静止物であるかを判定する静止物判定手段と、車両の位置を原点とする2次元座標上に投影された静止物の時系列の位置データの中から車両の速度に基づき2つの位置データを選択する手段と、2次元座標上において、X軸上に中心を持ち選択された2つの位置データを通る円から静止物の軌跡を算出する手段と、静止物の軌跡から車両の旋回半径を算出する手段と、を備える。
(もっと読む)
障害物回避支援装置及び障害物回避支援方法
【課題】運転者の意図に応じた障害物回避支援の解除を確実に反映できるようにする。
【解決手段】自車両前方に回避が必要な障害物を検出すると、その障害物に対する回避軌道を求め、その回避軌道に基づいて自車両を走行制御するための追従操舵力を算出する。その算出した追従操舵力と運転者の操舵力に基づいてアシスト操舵力を算出して障害物回避のための走行制御を行う。そして、上記運転者の操舵力がアシスト操舵力に対抗して保舵する力を超えたことを検出したら、自車両のアシスト操舵力の解除と判定する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺監視装置に関わり、同期回路を必要とせず、複数の検出手段の検出タイミングを調整する。
【解決手段】車両の周辺の物体情報を所定周期で連続して検出する第1検出手段と、第1検出手段とは異なる方法で、車両の周辺の物体情報を所定のタイミング毎に検出する第2検出手段と、第1検出手段が1周期内に検出した物体情報の検出タイミングを当該1周期内の1つのタイミングとして補正する時間補正手段とを備え、その1周期内の1つのタイミングは、第2検出手段の所定のタイミングの1つと一致させる。
(もっと読む)
環境予測装置
【課題】適正な走行支援をするために十分な自車両周辺の物体挙動の情報を取得することが可能な環境予測装置を提供する。
【解決手段】環境予測装置1は、道路Aに関する道路情報を取得する道路情報取得部4と、所定時間後の自車両81位置を予測する自車両位置予測部61と、道路情報と所定時間後における自車両81位置とに基づいて予測期間Tを設定する予測期間設定部62と、を備えている。予測期間設定部62は、自車両81が所定の条件のときに予測が打ち切られることがないように予測期間Tを設定する。
(もっと読む)
1,111 - 1,120 / 7,349
[ Back to top ]