
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,171 - 1,180 / 7,349
車線逸脱警報装置及び警報方法
【課題】自車両の走行車線からの逸脱を警報する車線逸脱警報の技術に関し、不要な車線逸脱警報を抑制することができるようにする。
【解決手段】所定時間内に予め設定された所定回数以上の警報が発生した場合に、今回の逸脱判定閾値を前回の逸脱判定閾値から所定値だけ車線外側に変更し、また、前記所定時間を経過しても警報が一回も発生しない場合に、今回の逸脱判定閾値を前回の逸脱判定閾値から所定値だけ車線内側に変更し、このように変更された今回の逸脱判定閾値に基づき自車両の走行車線からの逸脱を判定し、逸脱ありと判定された場合にその逸脱を警報する。
(もっと読む)
追従制御装置

【課題】ACCによる追従制御時の車線変更時の車両の加速制御を的確に行う上で有利な追従制御装置を提供する。
【解決手段】ACCにより追従走行しているときの自車両201の車線変更時の加速制御のタイミングを、自車両201の走行方向が車線境界線103となす角度、車線境界線103と自車両201との距離、自車両走行車線101の前方車両202についての車両情報、隣接車線102の前方車両203、後方車両204についての車両情報をもとに決定する。また、自車両の車線変更時、自車両の走行速度と、隣接車線102の前方車両203、後方車両204の有無と、前方車両203、後方車両204が存在している場合の前方車両203、後方車両204の走行速度に応じた加速制御を行う。
(もっと読む)
移動体検出装置及び移動体検出方法
【課題】あらゆる方向に移動する移動体をより確実に検出することができる移動体検出装置を提供する。
【解決手段】車両に搭載したカメラによって撮影されたカメラ画像を取りみ、画像の複数点Pの動きベクトルを生成する動きベクトル生成部と、点Pの動きベクトルの傾きを自車移動パラメータの回転成分で補正したとき、点Pから消失点への傾きと等しいとして自車移動パラメータの回転成分(Rx,Ry,Rz)を推定する自車移動パラメータ推定部と、画像内の任意の点Qの動きベクトルの傾きを自車移動パラメータの回転成分を用いて補正し、補正後の動きベクトルの傾きと、任意の点Qと消失点を結ぶ線との傾きを比較し、一致度が低いときに自車移動方向と異なる方向を持つ移動体として検出する移動体判定部と、を具備する。
(もっと読む)
レーダ装置
【課題】ターゲットから反射波を受信した際に、当該ターゲットが上方構造物であるか車両であるかを判別できるようにする。
【解決手段】演算処理器26は、反射波の強度の2階微分値を算出し、当該2階微分値に基づいてターゲット32が上方構造物であるか車両であるかを判別する。または、反射波の強度波形を周波数成分に分離し、特定の周波数成分の強度に基づいてターゲット32が上方構造物であるか車両であるかを判別する。
(もっと読む)
異常走行車両検出システムおよび道路監視プログラム
【課題】道路および車両に特別な設備や機能をもたせることなく、道路を走行する車両の異常走行を一定の精度で検出し外部に報知することのできる異常走行車両検出システムおよび道路監視プログラムを提供する。
【解決手段】異常走行車両検出処理部13−16は、上記キャプチャ部12が取り込んだフレーム単位の画像を一定の周期で入力し、入力した現在画像と過去画像を差分処理して変化画素領域を矩形の領域として抽出し、抽出した矩形の領域を処理対象オブジェクトとして上記一定の周期毎に追跡し、追跡している処理対象オブジェクトが予め設定された監視対象オブジェクトであるか否かを判定して、判定した監視対象オブジェクトについて追跡情報と設定情報とをもとに当該オブジェクトが予め設定された異常走行パターンに合致する走行状態にあるか否かを判定する。
(もっと読む)
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
(もっと読む)
車線逸脱警報装置及び警報方法
【課題】自車両の走行車線からの逸脱を警報する車線逸脱警報の技術に関し、不要な車線逸脱警報を抑制することができるようにする。
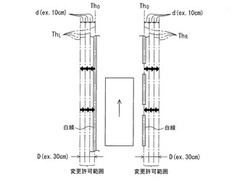
【解決手段】自車両の走行車線の車線幅Wを認識するとともに自車両の車速Vを検出し、次いで前記車速Vに応じて最小車線幅WMINを求め、認識した車線幅Wが最小車線幅WMINよりも小さい場合には、認識車線幅Wと最小車線幅WMINとの差に応じて変更値dを算出して、走行車線を規定する白線に対して設定された判定基準値Th0から変更値d分だけ車線外側に変更した位置に逸脱判定閾値Thを設定し、その設定された逸脱判定閾値Thに基づき自車両の走行車線からの逸脱を判定し、逸脱ありと判定された場合にその逸脱を警報する。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺を撮影した複数の画像を合成して、車両周辺の状況を俯瞰する俯瞰画像を生成すると、障害物が歪んで表示される。
【解決手段】撮影手段30の撮影範囲に向けて設置された障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両に近い領域は、撮影手段30で撮影した画像を第1仮想画像生成手段50によって、車両を上空の仮想視点から見下ろした第1仮想画像に変換し、障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両から遠い領域は、撮影手段30で撮影した画像を第2仮想画像生成手段60によって、第1仮想画像と連続する第2仮想画像に変換し、第1画像合成手段90によって、第1仮想画像と第2仮想画像とを合成して、画像表示手段100に表示する。
(もっと読む)
追突防止支援装置
【課題】先行車両との距離が接近した場合に、追い越し等のステアリング操作による衝突回避を意図している場面か否かを判断して、不要な警報の発生を抑制することができる追突防止支援装置を提供することを課題とする。
【解決手段】本発明は、自車両と先行車両との車間が所定距離以下になるタイミングで警報を行う追突防止支援装置において、自車両が所定距離以下になるまでの車両挙動を検出し、検出された車両挙動に基づいて、警報のタイミングを変更する場合において、先行車両の接近過程における接近の変化量を車両挙動として検出し、接近の変化量が穏やかである場合に、警報のタイミングを通常時よりも遅く変更する。
(もっと読む)
車線逸脱警報装置及び警報方法
【課題】自車両の走行車線からの逸脱を警報する車線逸脱警報の技術に関し、不要な車線逸脱警報を抑制することができるようにする。
【解決手段】自車両の走行車線の左右各側の路肩を左右個別に認識し、路肩が認識された側においては、予め任意の位置に設定した判定基準値から所定値だけ車線外側にずらした位置に逸脱判定閾値を設定し、路肩が認識されなかった側においては判定基準値をそのまま逸脱判定閾値として設定し、その設定された逸脱判定閾値に基づき自車両の走行車線からの逸脱を判定し、逸脱ありと判定された場合にその逸脱を警報する。
(もっと読む)
1,171 - 1,180 / 7,349
[ Back to top ]