
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
111 - 120 / 7,349
車車間通信システム、および車車間通信装置
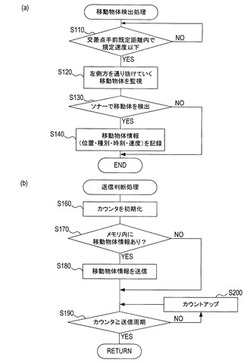
【課題】互いに通信を行う複数の車車間通信装置を備えて構成された車車間通信システムにおいて、移動物体情報をより確実にやり取りできるようにする。
【解決手段】各車車間通信装置は、この車車間通信装置が搭載された自車両の位置情報を含む自車両の情報を取得し、車車間通信装置が搭載された自車両の周囲に存在する移動物体の位置情報を、この移動物体を検出した時刻を表す検出時刻を含む移動物体情報として検出し、検出した移動物体情報をメモリに格納する(S120,S130)。そして、移動物体情報を繰り返し周囲の他車両に搭載された車車間通信装置に送信するとともに、他車両に搭載された車車間通信装置から送信されてくる同種の情報を繰り返し受信する(S160〜S200)。さらに、自車両の位置情報と他車両から受信した移動物体情報とに基づいて、移動物体が自車両にとっての危険要素であるか否かを判断し、この判断結果を出力する。
(もっと読む)
駐車支援装置

【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
(もっと読む)
距離推定装置
【課題】自車から障害物までの距離推定の精度向上を図る。
【解決手段】ビデオカメラ11で捕えた画像より建物等の障害物の法線ベクトルを垂直成分抽出部13で抽出し、抽出された法線ベクトルに基づき、傾斜路判定部15で傾斜路かの判定と傾斜路の場合の傾斜角を算出する。予めカメラ11で捕えた画像から基準法線ベクトルを抽出するとともに、画像の画素毎と自車との距離データをメモリ10に保存しておく。自車と障害物まで平坦路と傾斜路があった場合に、平坦路と傾斜路の境界と障害物までの距離を傾斜角に基づき補正するようにして自車から障害物までの距離推定の精度を向上した。
(もっと読む)
車両周辺監視装置
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
車載用電子機器及びプログラム
【課題】ドライバーに購買意欲を生じさせることが可能な車載用電子機器及びプログラムを提供する。
【解決手段】制御部29には、設定ボタン13,選択ボタン14,切替ボタン15,リセットボタン16,電源スイッチ20,コネクタ部22,無線受信機23,マイクロ波受信機24,GPS受信機25,表示装置12,警報ランプ17,スピーカ26,データベース30が接続されている。データベース30には、車両速度測定装置の位置に関わる情報の他に、疑似情報を提供するための各種情報が出荷時に記憶されている。制御部29は、データベース30に記憶された情報を用いて表示装置12に疑似運転状況を表示させるとともに、取得した速度情報に対応して変化する画像情報及び音声情報を夫々画像及び音声として表示及び出力する。
(もっと読む)
運転支援装置および運転支援方法
【課題】衝突したときの重大性が高いと予測される運転支援情報を優先的にドライバに提示し、衝突事故が起きた場合でもその被害を最小限に抑えることができる運転支援装置の提供。
【解決手段】自車両周辺の障害物との衝突を回避し又は衝突時の被害を低減するための運転支援装置であって、衝突したときの重大性に応じたドライバ提示情報を生成する提示情報生成手段と、提示情報生成手段によって複数のドライバ提示情報が生成された場合に、当該複数のドライバ提示情報の中から、衝突したときの重大性が最も高いドライバ提示情報を選択する提示情報選択手段と、提示情報選択手段で選択されたドライバ提示情報をドライバに提示する情報提示手段とを備える。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
運転支援装置
【課題】立体表示された走行予想軌跡線の下枠線と上枠線の関係を直感的に判断することのできる運転支援装置を提供することを目的とする。
【解決手段】撮像装置7から入力された自車両外部の撮像画像に不揮発性メモリ4から読み出された自車両の立体的な走行予想軌跡線30を重畳して外部の表示装置12に出力する映像処理装置3と、ステアリングセンサ10から入力されたハンドル角度信号に基づいて、映像処理装置3が重畳する立体的な走行予想軌跡線30の向きを制御する制御手段5とを備え、走行予想軌跡線30は、立体の下面側を示す第1の軌跡線31と立体の上面側を示す第2の軌跡線32とを有し、かつ、立体側面33を第1の軌跡線31と前記第2の軌跡線32で挟まれた空間で構成し、制御装置5は、映像処理装置3に、走行予想軌跡線30の立体側面33の色の濃度を高さ方向に向けて段階的に変化させる。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
111 - 120 / 7,349
[ Back to top ]