
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,201 - 1,210 / 7,349
飲酒運転防止装置
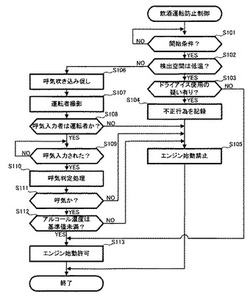
【課題】人為的に低温空間を構築することによるアルコールインターロックの不正回避を防止する。
【解決手段】所定の温度範囲で運転者呼気のアルコール濃度を検出可能な第1検出手段と、該アルコール濃度の検出がなされる空間の温度を検出可能な第2検出手段とを備えた車両において、飲酒運転防止装置(100)は、上記空間の二酸化炭素濃度に対応付けられた参照値を取得する取得手段と、上記取得された参照値に基づいて上記二酸化炭素濃度の変化量が基準変化量以上であるか否かを判別する判別手段と、上記検出された温度が上記温度範囲の下限値に対応する基準温度未満である場合において上記変化量が上記基準変化量以上であると判別された場合に車両の始動を禁止する禁止手段とを具備する。
(もっと読む)
車両周辺監視装置

【課題】オプティカルフローによる画像処理を用いることなく、撮影画像から移動物体を検出し、その移動物体の存在を運転者が容易に気づくことができる車両周辺監視装置を提供する。
【解決手段】自車両に搭載され、自車両外部の周辺を撮影する撮影装置と、撮影装置にて撮影された撮影画像における検出ラインを設定し、検出ラインに沿って移動する移動物体の移動に伴って生じる検出ライン上の画素の明るさの変化を検出する検出手段と、検出手段により検出された結果に応じて、情報表示を生成する生成手段とを有する制御装置と、撮影画像及び情報表示を表示する表示装置とを備える車両周辺監視装置。
(もっと読む)
瞳孔隠蔽状態検出装置及びそれを備えた車載カメラ
【課題】直接的に瞳孔の隠蔽状態を検出することができる瞳孔隠蔽状態検出装置を提供すること。
【解決手段】瞳孔隠蔽状態検出装置20は、運転者の視線の方向を検出する視線方向検出手段22と、目領域の画像の輝度勾配を算出する輝度勾配算出手段23と、勾配強度垂直分布を算出する勾配強度算出手段24と、運転者の視線の方向がインストルメントパネルの方向である場合の基準勾配強度垂直分布のデータを保存する勾配強度保存手段25と、現フレームでの勾配強度垂直分布のデータと基準勾配強度垂直分布のデータとの差分を算出する差分算出手段26と、瞳孔が隠蔽されている可能性を示す評価値を算出する評価値算出手段27と、所定数以上のフレームにわたって瞳孔が隠蔽されている可能性を示す評価値が連続した場合、瞳孔が隠蔽されていると判定する瞳孔隠蔽判定手段29と、を備える。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
平面図生成装置及び平面図生成方法
【課題】車載カメラ画像及び路側カメラ画像に基づいて平面図を生成する場合に、高精度の平面図を生成することができる平面図生成装置及び平面図生成方法を提供すること。
【解決手段】位置/向き推定部111が、車載カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第1の垂直平面画像と、路側カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第2の垂直平面画像とに基づいて、車載装置100が搭載されている車両の位置及び向きを推定し、パラメータ調整部112が、推定された位置及び向きに基づいて、平面変換で用いられるパラメータを調整し、水平平面画像生成部113が、車載カメラ画像の内の道路領域画像を、パラメータ調整部112で調整されたパラメータを用いて平面変換することにより、水平平面画像を生成する。
(もっと読む)
歩行者検出装置
【課題】カメラによって取得した画像から歩行者を正確に検出しつつ、かつ当該歩行者を検出するための演算量を低減する高精度および高効率な歩行者検出装置を提供する。
【解決手段】本発明は、車両に搭載される歩行者検出装置であって、車両周辺の画像を取得する画像取得手段と、画像取得手段によって取得された画像から歩行者を探索する探索密度について、当該画像領域内で探索密度を一定とする探索密度一定モードと、当該画像領域内のうち、探索密度が高い第1領域と探索密度が低い第2領域とを設定する探索密度重点モードとのいずれかの探索密度モードを、道路状況に応じて設定する探索密度モード設定手段と、探索密度モード設定手段によって設定された探索密度モードに基づいて、画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、歩行者探索手段によって探索された結果を通知する結果通知手段とを備える。
(もっと読む)
車両用の情報表示装置
【課題】自車両の前方、或いは後方に位置する他の車両に対して、自車両が原因で生じる死角全体を可視化した画像を提供する。
【解決手段】情報表示装置1は、前方カメラ11、後方カメラ12、左方カメラ13、右方カメラ14を備えている。そして、自車両が交差点で右折待ちをし、かつ交差点で対向車両(前方車両)が右折待ちをしているとき、および自車両の後方に後方車両が存在しているときのうちいずれか一方であるとき、電子制御装置30は、対向車両或いは後方車両の位置を仮想視点としたときに自車両が原因で生じる死角全体を可視化した合成画像をカメラ11、12、13、14の撮像画像に基づいて生成してディスプレイ20〜23に表示させる。これにより、後方車両、或いは対向車両の運転を適切に支援することができる。
(もっと読む)
歩車間通信システム
【課題】従来、歩行者端末で、歩行者の行動や周辺状況から危険度を判定し、その危険度に応じて通信制御を行ない、注意喚起することができなかった。
【解決手段】自歩行者コンテクスト情報、他歩行者コンテクスト情報、車両コンテクスト情報のうちの1以上の情報であるコンテクスト情報を取得するコンテクスト情報取得部と、コンテクスト情報が有する少なくとも一部の情報である歩行者端末情報を送信する歩行者端末情報送信部と、前記コンテクスト情報を、危険度を判定するための危険判定情報に適用し、前記歩行者の危険度を取得する危険度取得部と、危険度に応じて、歩行者端末情報を送信するか否か、または歩行者端末情報の送信方法を変更する歩行者端末により、危険度判定を行ない、それによって通信制御を行ない、注意喚起することができる。
(もっと読む)
車両用危険度算出装置
【課題】計算工程を削減して、演算処理にかかる時間を短縮することが可能な車両用危険度算出装置を提供すること。
【解決手段】自車両周辺の走行環境を認識し、認識された走行環境情報に基づいて、自車のリスクポテンシャルと自車周囲の対象物リスクポテンシャルとの重なりである両者の衝突危険度を演算する。そして、自車の車幅方向の中心が横軸の中心として設定されたグリッド状のマップを用いて、位置ごとに衝突危険度を表現するリスクポテンシャルマップを生成する。これにより、縦軸と横軸が交差する基準点(ゼロ点)に、自車の車幅方向の中心を設定して、リスクポテンシャルの分布状況を表すことが可能となる。それため、自車位置から一定範囲の領域における衝突危険度の積算値を算出する際に、1点のメモリアクセスを実行して算出することが可能となる。
(もっと読む)
可動物予測装置及びプログラム
【課題】適切な精度で、可動物の将来の位置及び移動状態を予測することができると共に、計算量の増大を抑制することができるようにする。
【解決手段】行動変化度算出部44は、検出された可動物の各々について、可動物の種類及び位置に基づいて、可動物の行動変化度を算出する。予測方法選択部46は、可動物の各々について、行動変化度が閾値未満である場合、可動物の種類、位置、及び移動状態に基づいて、可動物単位で、可動物の将来の位置及び移動状態を線形予測し、算出された行動変化度が閾値以上である場合、可動物を表わす複数の可動物粒子の各々について将来の位置及び移動状態を予測することにより、可動物の将来の位置及び移動状態を予測する。
(もっと読む)
1,201 - 1,210 / 7,349
[ Back to top ]