
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
121 - 130 / 7,349
車両運行状態情報基盤の運転集中度判断方法及びそのシステム
【課題】
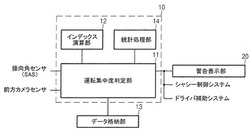
車両走行中操向角の変化と前方カメラセンサを介し取得された車両運行状態情報に基づきドライバの運転集中度を判定できるインデックスを算出し、その算出結果を統計的な情報に変換してドライバの集中度を判断する車両運行状態情報基盤の運転集中度判断方法及びそのシステムを提供する。
【解決手段】操向ホイールの変位を感知する操向角センサと、前方カメラセンサと、操向角センサと前方カメラセンサから印加される信号を所定の時間間隔で格納すると共に、インデックス演算部により算出された値を累積させ標準値として管理するデータ格納部と、格納されたデータに基づき定量的インデックスを算出するインデックス演算部と、これを統計的に処理して状態情報を出力する統計処理部と、状態情報を算出し、データ格納部に記録された標準値と比べてドライバの運転集中度を判定する運転集中度判定部と、を含んで構成されたことを特徴とする。
(もっと読む)
車両用スポットランプ制御装置および車両用スポットランプシステム

【課題】歩行者に与えるグレアを抑制しつつ当該歩行者に車両の存在を適切に認識させ、さらに当該歩行者の存在を運転者に適切に認識させる。
【解決手段】車両用スポットランプ制御装置において、歩行者位置取得部は、位置検出装置によって検出された歩行者位置を取得する。点灯制御部は、照射位置を変更可能な車両用スポットランプによる光の照射を制御する。点灯制御部は、歩行者位置が取得された場合、歩行者位置を含む領域と歩行者位置よりも車両寄りの領域によって構成される第1領域にまず光を照射する。第1領域に所定時間光が照射されると、点灯制御部は、第1領域から歩行者の顔の位置を含む領域を削除した第2領域に光を照射する。これにより点灯制御部は、顔の位置に所定時間光を照射した後に、光が照射されている領域の上端を顔の位置よりも下方に移動させる。
(もっと読む)
走行支援装置
【課題】路側機が設置されていない交差点であっても、その交差点での走行を支援するための情報を提供する。
【解決手段】走行支援装置10は、擬似車両分布データ保有処理部22によって、交差点から所定範囲内の道路上に対応付けて設定された基準位置、及び、当該基準位置に対応付けて設定された基準進行方向を記憶し、自車両現在位置検出処理部23によって、自車両の現在位置を検出し、自車両進行方向検出処理部25によって、自車両の進行方向を検出し、自車両の現在位置が基準位置に近付き、かつ、自車両の進行方向が基準進行方向に近似している場合に、制御部11によって、交差点に関する運転支援を実行する。
(もっと読む)
車両の道路形状予測装置及びこれを備えた車両の走行制御装置
【課題】車車間通信により検出された他車両の情報に基づいて、車両の前方における道路形状を予測することができるようにした、車両の道路形状予測装置、及び、これを備えた車両の走行制御装置を提供する。
【解決手段】
他車両判定手段18aにより他車両2が車両1の進路前方にいると判定された場合に、他車両情報取得手段10により取得された他車両2の車速情報及び他車両2の運転操作情報に基づいて、車両1の進路前方における道路形状を予測する道路形状予測手段18を備え、運転操作情報には、他車両2のステアリング角の情報が含まれ、道路形状予測手段18は、他車両2のステアリング角が所定角以上である場合に、車両1の進路前方にカーブ路があると予測する。
(もっと読む)
対象物接近通知システム、対象物接近通知方法およびヘッドレスト
【課題】車両の運転者に、車両周囲の障害物の存在を直感的に伝えることができる対象物接近通知システムを提供する。
【解決手段】自車両の周囲に存在する対象物を検出し、自車両に対する方向を決定する対象物検出手段と、運転者に対して前記決定された方向から到来する音を弱める弱音手段と、を有することを特徴とする。また、前記対象物検出手段が検出した対象物のうち、運転者に通知すべき対象物を決定する通知決定手段をさらに備えていることが好ましい。また、前記弱音手段は、運転者の頭部に対して左右後方に配置された二つ以上の弱音装置によって音を弱めるようにしても良く、前記弱音手段は、特定の方向より運転者の耳に到来する音を遮る位置に遮蔽体が移動することで音を弱めるようにしても良い。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かの判定や、カーブしている車線境界線の認識を、簡易な構成において実現できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の垂線の傾きを用いて、後方の白線を近似する円の半径を、車線の曲率半径rを算出し、曲率半径rが所定値より大きい場合には、走行中の車線がカーブしている車線であると判定し、白線を円で近似し、他の場合には、走行中の車線が直進している車線であると判定し、白線を直線で近似する。
(もっと読む)
ナビゲーション装置および電子ベル制御方法
【課題】ナビゲーション装置に警報機能を持たせるとともに、走行中のユーザに対して最低限の簡単な操作方法を提供して警報機能の操作を許可するようにしたナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1が自転車に装着されたことを検出する装着検出部18と、前記自転車が走行中であることを検出する走行・停止判別部16と、警報または警報メッセージを音声データとして予め記憶した記憶部102と、音声出力部13から前記警報または警報メッセージを出力するよう制御する電子ベル制御部17と、を備え、前記走行・停止判別部16が、前記自転車が走行中であると判別した場合、前記タッチパネルのタッチ操作を検出すると、前記電子ベル制御部17は音声出力部13から前記警報または警報メッセージを出力するよう制御する。
(もっと読む)
運転者の状態を評価及び通信するための車両システム及び方法
【課題】運転者の状態を評価し、運転者の状態を車両外の他者に連続的に通信する車両システムの提供。
【解決手段】車両システムは、運転者の状態の種々の状況を通信する少なくとも1つの通信デバイスと、運転者及び車両のうちの少なくとも一方の少なくとも1つの特徴を検出する少なくとも1つのセンサであって、運転者及び車両のうちの少なくとも一方の少なくとも1つの特徴を表すセンサ信号を生成する少なくとも1つのセンサと、少なくとも1つのセンサ及び少なくとも1つの通信デバイスと通信しているプロセッサであって、センサ信号を受信し、命令セットに基づいてセンサ信号を分析して運転者の状態を判定し、運転者及び車両のうちの少なくとも一方の少なくとも1つの特徴に基づいて少なくとも1つの通信デバイスを制御して運転者の状態の種々の状況を他の車両に通信するプロセッサとを含む。
(もっと読む)
車線監視システム及び車線監視方法
【課題】車載カメラで撮影した自動車後方の画像に基づいて行う自動車前方の車線認識の処理の負荷を軽減できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線を直線に近似する。自動車がカーブを走行していない場合には、近似した直線を自動車前方の白線として認識し、自動車がカーブを走行している場合には、自車の中心を通る左右方向軸を対象軸として、近似した直線と線対称な直線を求め、求めた直線を自動車前方の白線として認識する。
(もっと読む)
車両用走行支援装置
【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
121 - 130 / 7,349
[ Back to top ]