
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
131 - 140 / 7,349
移動体検出装置、コンピュータプログラム及び移動体検出方法
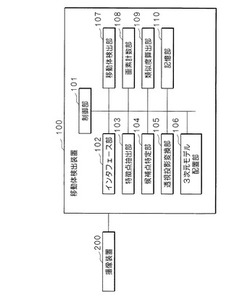
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
車両の制御装置

【課題】横断歩道の検出情報を利用して、車両の走行状態を制御することができる車両の制御装置を提供する。
【解決手段】車両1に搭載されたカメラ20による道路の撮像画像から、道路に敷設された横断歩道の画像部分を検出する横断歩道検出部12と、撮像画像における車両1の進行方向に対応する方向に対する横断歩道の画像部分の傾きに基づいて、道路の延伸方向に対する車両1の傾きを検出する車両傾度検出部13と、車両傾度検出部13により検出された傾きを減少させるための傾度減少処理を実行する傾度減少処理部14とを備える。
(もっと読む)
無線通信装置
【課題】データの衝突を回避しつつ、データ送信の機会を増加させる
【解決手段】通信装置2A,2B,2Cは、定期送信期間を示すデータである定期送信期間情報を無線送信するように構成され、通信装置3A,3B,3Cは、定期送信装置2から定期送信期間情報を受信すると、定期送信期間情報により示される定期送信期間外をランダム送信期間として、ランダム送信期間内にデータ送信する。通信装置2は、送信データの送信タイミングが定期送信期間内であり、且つ、当該通信装置2自身の定期送信期間外である場合には、当該通信装置2自身の定期送信期間内である場合よりも、送信電力を小さくしてデータ送信する。通信装置3は、送信データの送信タイミングが定期送信期間内であり、且つ、データを直接受信できない通信装置2の定期送信期間内である場合には、ランダム送信期間である場合よりも、送信電力を小さくしてデータ送信する。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かを簡易な構成において判定可能な「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の、自動車側方位置における白線の方向に対する方向差Δiを、自動車から当該白線上の位置までの、自動車側方位置における白線の方向の距離cxiと共に求める。複数の画像フレームについて求めたQi :(cxi, Δi)を合成し、各Qiを取る直線Δ=mx+uを近似的に求め、直線の傾きが大きい場合には、走行中の車線がカーブしている車線であると判定する。
(もっと読む)
メッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステム
【課題】空間認知過程で発生する情報歪曲現象を解消できるメッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステムを提供する。
【解決手段】本発明は、所定の制御信号に応じて超音波信号を発信する送信部と、前記送信部から発信された信号が物体に突き当たって戻る反響信号を受信する受信部と、前記送信部により超音波が走査される駐車予定空間に対して仮想の領域を設定し、当該領域を所定間隔のセル(cell)で分割したメッシュ型空間イメージをデータに格納するメッシュ型空間設定部と、前記反響信号を解析して前記メッシュ型空間設定部により設定されたメッシュ型分割領域に対して非障害物領域を確定する非障害物領域判定部と、前記非障害物領域判定部により確定された非障害物領域を除外させ、最終的な空間分析結果を算出するコントローラとを含んでなることを特徴とする。
(もっと読む)
車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システム
【課題】車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システムの提供。
【解決手段】少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、前記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、、前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
(もっと読む)
車両周辺監視装置
【課題】画像から検出された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置(10)は、撮像画像(IL)に基づいて監視対象物を検出する対象物検出部(60)と、撮像画像(IL)内における前記監視対象物の位置を算出する位置算出部(66)と、前記監視対象物までの距離を算出する距離算出部と(64)、撮像画像(IL)を汎用ディスプレイ(26)に表示させるとともに、前記監視対象物を強調表示させる第1表示制御部(72)と、前記監視対象物の撮像画像(IL)内における位置に対応する表示位置で、該監視対象物をシンボル化したマークをMID(28)に表示させる第2表示制御部(74)とを備え、第2表示制御部(74)は、前記監視対象物の撮像画像(IL)内における位置及び該監視対象物までの距離に応じて、ブレーキを促す旨及び回避方向のどちらか一方を表示させる。
(もっと読む)
車両用スポットランプ制御装置および車両用スポットランプシステム
【課題】歩行者に与えるグレアを抑制しつつ当該歩行者に車両の存在を適切に認識させ、さらに当該歩行者の存在を運転者に適切に認識させる。
【解決手段】車両用スポットランプ制御装置において、歩行者位置取得部は、位置検出装置によって検出された歩行者位置を取得する。点灯制御部は、照射位置を変更可能な車両用スポットランプによる光の照射を制御する。点灯制御部は、歩行者位置が取得された場合、歩行者位置を含む領域と歩行者位置よりも車両寄りの領域によって構成される第1領域にまず光を照射する。第1領域に所定時間光が照射されると、点灯制御部は、第1領域から歩行者の顔の位置を含む領域を削除した第2領域に光を照射する。これにより点灯制御部は、顔の位置に所定時間光を照射した後に、光が照射されている領域の上端を顔の位置よりも下方に移動させる。
(もっと読む)
車両運行状態情報基盤の運転集中度判断方法及びそのシステム
【課題】
車両走行中操向角の変化と前方カメラセンサを介し取得された車両運行状態情報に基づきドライバの運転集中度を判定できるインデックスを算出し、その算出結果を統計的な情報に変換してドライバの集中度を判断する車両運行状態情報基盤の運転集中度判断方法及びそのシステムを提供する。
【解決手段】操向ホイールの変位を感知する操向角センサと、前方カメラセンサと、操向角センサと前方カメラセンサから印加される信号を所定の時間間隔で格納すると共に、インデックス演算部により算出された値を累積させ標準値として管理するデータ格納部と、格納されたデータに基づき定量的インデックスを算出するインデックス演算部と、これを統計的に処理して状態情報を出力する統計処理部と、状態情報を算出し、データ格納部に記録された標準値と比べてドライバの運転集中度を判定する運転集中度判定部と、を含んで構成されたことを特徴とする。
(もっと読む)
走行支援装置
【課題】路側機が設置されていない交差点であっても、その交差点での走行を支援するための情報を提供する。
【解決手段】走行支援装置10は、擬似車両分布データ保有処理部22によって、交差点から所定範囲内の道路上に対応付けて設定された基準位置、及び、当該基準位置に対応付けて設定された基準進行方向を記憶し、自車両現在位置検出処理部23によって、自車両の現在位置を検出し、自車両進行方向検出処理部25によって、自車両の進行方向を検出し、自車両の現在位置が基準位置に近付き、かつ、自車両の進行方向が基準進行方向に近似している場合に、制御部11によって、交差点に関する運転支援を実行する。
(もっと読む)
131 - 140 / 7,349
[ Back to top ]