
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
171 - 180 / 7,349
走行制御装置および車両
【課題】物体の位置に拘わらず、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
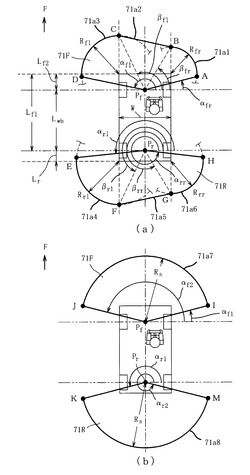
【解決手段】物体80の衝突回避を行う領域として、非対称バンパー形状の仮想バンパー領域71を設定できるようになっており、車両感覚のつかみやすい方向にある仮想バンパー領域71の外縁71a(外縁71a1〜71a6)ほど、車両1からの距離が短く設定される。これにより、車両感覚のつかみやすい方向に物体80がある場合には、物体80が車両1の近くまで迫った場合に反発力Frが仮想的に車両1に加えられるが、物体80までの距離感をつかみやすいので、安心して運転を行うことができる。また、車両感覚のつかみにくい方向に物体80がある場合には、早めに車両1に加えられた反発力Frを感じることができ、安心して運転を行うことができる。
(もっと読む)
車両の危険報知装置及び危険報知システム

【課題】車線をはみ出しての走行や横転のおそれのある他車両を検出し、早期に自車両及び他車両に危険報知を行なうことができるようにした、車両の危険報知装置及び危険報知システムを提供する。
【解決手段】
周辺道路情報検出手段17により自車両1の前方にカーブ路があることが検出され、且つ、情報通信手段14により取得された他車両2の位置情報に基づいて他車両2が該カーブ路に進入する位置にいることが検出された場合、少なくとも他車両2の車速Vが所定車速Vp以上であることを含む危険報知条件が成立したら、危険報知手段11により自車両1の運転者に対して危険報知させ、情報通信手段14により他車両2に危険報知信号を送信させる危険報知制御手段15を備える。
(もっと読む)
走行制御装置および車両
【課題】車両の速度または加速度を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両速度Vが速いほど、車両1の進行方向において仮想バンパー領域71が広くなるように形成されるので、車両1が速い速度で走行している場合に、より早い段階から進行方向にある物体80との衝突回避を行うことができる。また、車両1が減速している場合に、その減速度の大きさが大きいほど、その車両1の進行方向とは逆方向において仮想バンパー領域71が広くなるように設定される。これにより、車両速度Vが急激に遅くなる場合に、その進行方向とは逆方向にある物体80との衝突、例えば、進行方向とは逆方向からの追突を回避することができる。従って、車両1の車両速度Vまたは加速度aを考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
運転支援装置
【課題】車両近傍の物体検出を精度よく行うことができる運転支援装置を提供することを目的とする。
【解決手段】本発明の運転支援装置は、車両周囲を撮像する撮像カメラ10と、車両周囲に照射光を発するLED23と、反射光を取得する第2の撮像素子21と、反射光に基づいて距離画像を算出する第2の信号処理部22と、距離画像から物体を検出する物体検出処理部36とを備える。そして、第2の信号処理部22が算出した距離画像のうち物体検出処理部36が検出した物体を示す画像を撮像カメラ10が撮像した撮像画像に合成する合成手段37と、この合成手段37が合成した合成画像を表示する表示装置40を備えたことを特徴とする。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
ドライバ支援システムのための、道路地形を検出する方法及びシステム
【課題】
本発明は、カメラ画像等の知覚入力に基づいて、車両の環境内における選択された位置を分類する方法を実行する道路地形検出システムについて記載する。
【解決手段】
本方法では、上記環境における、ベースポイントと称する選択された位置についての、高水準の空間特徴生成を行う。このベースポイントについての空間特徴生成は、環境の視覚的及び物理的特徴物を捉えた価値連続な信頼度表現に基づいて行われる。この信頼度表現は、生の知覚データを処理するいわゆる基本分類器により生成される。これにより、本道路地形検出では、センサデータから把握される局所的特徴物と、2段階の特徴抽出処理を経て取得されるこれら局所的特徴物の間の関連性とを組み込むことができる。
(もっと読む)
ナビゲーション装置、現在位置修正方法、および、プログラム
【課題】移動体がカーブ路へ進入する手前において、現在位置の誤認識をなるべく修正する技術を提供する。
【解決手段】移動体に設置されたナビゲーション装置100は、当該移動体の地図上における現在位置を算出する現在位置算出手段と、その現在位置に基づき、当該移動体の地図上の進行方向にカーブ路が存在するか否か判定するカーブ路判定手段と、カーブ路判定手段でカーブ路が存在すると判定された場合に、当該移動体において当該カーブ路に進入する準備がなされないとき、現在位置算出手段で算出された現在位置を修正する現在位置修正手段と、を備える。
(もっと読む)
携帯端末装置
【課題】ユーザの操作や特定の環境を走行することなく、精度良く外界状況を認識することのできる携帯端末装置を提供する。
【解決手段】運転支援システムに用いられる携帯端末装置1において、後方カメラ3の車室内の画像に基づき予め複数定められた車室内の特徴部を抽出するための特徴部情報と、各特徴部の位置情報と、携帯端末装置1の設置位置と設置角度に関する予め定められた基準位置情報とを、車種毎に記憶する記憶手段4と、記憶された特徴部情報と後方カメラ3の画像情報とに基づいて、各特徴部の位置を導出する導出手段5と、導出された各特徴部の位置と各特徴部の位置情報とを照合する照合手段6と、照合結果から携帯端末装置1の実設置位置および実設置角度を算出する算出手段7と、前方カメラ2による外界認識結果を補正する補正手段8とを備え、補正手段8は、基準位置情報に対する実設置位置および実設置角度のずれ量に応じて前方カメラ2の外界認識結果を補正する。
(もっと読む)
移動体通信装置及び走行支援方法
【課題】追突防止支援と信号機見落とし防止支援とが同時に提供される場合に、状況に応じて優先して提供すべき支援を決定して、優先度に基づいて走行支援を提供する移動体通信装置及び走行支援方法を提供すること。
【解決手段】移動体に備えられ、走行支援として、信号機への注意喚起を行う第1のサービスと、追突注意喚起を行う第2のサービスとを提供可能な移動体通信装置であって、提供サービスの内容を示すシステム情報と、当該サービスを提供するために必要な情報と、を含む情報を受信する通信部と、前記移動体の現在位置を示す情報を含む情報を取得する制御部と、を備え、前記制御部は、前記システム情報に前記第1のサービス及び前記第2のサービスが含まれるときに、少なくとも、前記移動体の現在位置を示す情報と、第1のサービスの監視対象基準地点の位置を示す情報と、第2のサービスの監視対象基準地点の位置を示す情報と、に基づいて前記第1のサービス又は前記第2のサービスのいずれを優先して提供するかを決定することとする。
(もっと読む)
171 - 180 / 7,349
[ Back to top ]