
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,021 - 2,030 / 7,349
画像生成装置及び画像表示システム
【課題】車両の走行速度が所定の閾値より低い場合に周辺画像を表示させるときに、表示モードの切り替え無しに車両の周辺の必要な領域の状況をユーザに提供する。
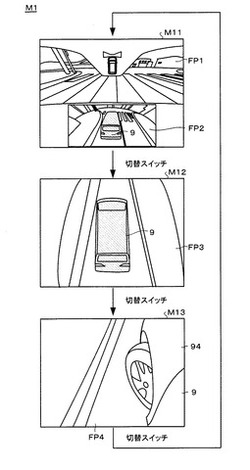
【解決手段】画像表示システムでは、車両9の走行速度が所定の閾値より低くなりフロントモードM1に移行すると、フロントモードM1の開始時点では車両9の前方領域及び側方領域の双方を同時に表示可能な汎用性の高い前側方モードM11とされる。前側方モードM11で示される画面は、交差点への進入、すれ違い、幅寄せなどの想定される様々な状況に対応可能であることから、ユーザは表示モードを切り替えることなく、車両9の周辺の必要な領域の状況を確認することができる。
(もっと読む)
周囲形状検出装置、自律移動装置、移動体の操縦補助装置、周囲形状検出方法、自律移動装置の制御方法及び移動体の操縦補助方法

【課題】自律移動装置において、例えば草むらなどが存在する進路において、草むらなどの上面を走行可能な平面として検出してしまうことを防止する。
【解決手段】複数のカメラ3aL,3aRにより基準画像と参照画像とを含むステレオ画像を撮像する撮像手段と、撮像手段により得られるステレオ画像に基づいてこのステレオ画像中の平面領域を抽出するとともに抽出された平面領域以外の領域に対して物体検出処理を行い移動可能領域を検出する制御手段とを備え、第1の波長帯域の反射率と第2の波長帯域の反射率との比が所定値よりも高い点を植物の葉と判別し、撮像手段により撮像された像のうち、植物の葉であると判別された領域を除外し、残余の領域について、平面領域の抽出及び物体検出処理を行う。
(もっと読む)
カメラシステムの拡張方法、カメラシステム、運転者支援システム、および対応する車両
【課題】車両の既存のカメラシステムのための統合コンセプトを維持して、車両用のステレオカメラシステムを提供すること。
【解決手段】車両用のカメラシステムの拡張方法であって、該カメラシステムは拡張前に、第1のカメラと評価ユニットを有し、該評価ユニットは、車両の運転者支援システムをサポートするように構成されており、前記第1のカメラは第1の通信接続によって、前記評価ユニット接続されている拡張方法において、前記第1のカメラと評価ユニットとが、1つの共通のハウジングに配置され、前記カメラシステムが、第2のカメラにより拡張され、該第2のカメラは、前記ハウジングの外部に、該ハウジングとは別に配置され、前記第2のカメラは、第2の通信接続を介して前記評価ユニットと接続されることを特徴とする拡張方法。
(もっと読む)
欠伸判定装置及び方法
【課題】パターンマッチングを用いることなく精度の高い欠伸状態の判定を行うことができる欠伸判定装置及び方法を提供する。
【解決手段】顔画像に含まれる口画像から顔特徴検出部11が抽出した特徴点に基づいて、特徴選択・計測部12及び開口比率演算部13が口の縦横比を算出する。開判定部14は、縦横比と開判定しきい値更新部16が更新した所定の開判定しきい値とを比較して口の開閉状態を判定し、欠伸検出部15は、口が開状態と判定された開口時間と期間しきい値検出部17が更新した所定の期間しきい値とを比較して、欠伸状態が発生しているか否かを判定する。
(もっと読む)
車両走行速度制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全対策およびエネルギー消費量・排出ガス量削減効果の一層の向上。
【解決手段】
車両は地点P通過時に、地点Pにおいて、地点P通過時刻、地点Pより交差点Aまでの
走行距離D、地点P−交差点間許容最高速度Vmax、地点P通過時刻、および交差点Aを
青信号・無停止で通過するための交差点Aへの到達設定時刻ta 、の各情報を得るとともに、
地点P通過後の経過時間Δt 、走行距離ΔDの計数を開始し、
その後地点P通過後一定時間Tc経過毎に推奨走行速度voptn(但し、n:0、1、2、
3、・・・、vopt0:地点P通過時の推奨走行速度)を算出して、前記voptn がその時点、の自車速vsnに対して、vsn >voptn であれば惰性走行、またvsn ≦voptn であればvoptn による推奨走行速度走行、で交差点に向けて走行し、交差点Aを青信号・無停止で通過する。
(もっと読む)
車線判定装置及びナビゲーションシステム
【課題】片側複数車線の道路を走行している自車の走行車線を迅速且つ正確に判定することができる車線判定装置を提供する。
【解決手段】車線判定装置100は、片側複数車線道路Bの進入口に予め設定された基準位置402、502を検出し、その基準位置402、502からの進入距離Lと地図情報に基づいて、自車400が片側複数車線道路Bの走行車線B1〜B3のいずれを走行しているのかを判定する。
(もっと読む)
リスク予測システム
【課題】現在のリスクだけでなく近い未来のリスクを認識し、ドライバへの警告や車両制御によるリスク回避を可能とする。
【解決手段】特徴量抽出部4で画像入力部2からの画像データから特徴量を抽出し、状態認識部5でN次元の特徴量ベクトルを1次元の状態に変換する。また、リスク情報抽出部6で車両データ入力部3から入力される車両情報からリスク情報を抽出して教師情報を作成する。リスク認識部7は、状態認識部5で得られた状態とリスク情報抽出部6で作成された教師との相関関係から状態のリスクを学習・認識する。更に、リスク予測部8は、時系列的な状態の遷移をマルコフモデルを用いてモデル化し、状態遷移確率をオンラインで学習更新することにより未来の状態を予測して対応するリスクを予測する。そして、リスク情報出力部9から現在のリスクと予測した未来のリスクをモニタや音声等により出力する。
(もっと読む)
車接近警告装置
【課題】自転車が歩道を歩いている歩行者に音も無く背後から急速に近づき、接触事故を起こすケースが目立っている。速度の速い場合は自転車が前方を歩行している歩行者に接近する時間も短いので早めに適切な音量で歩行者に自転車の接近を知らせる必要がある。
また、今後急速な普及が予測されている低騒音の電気自動車、電気オートバイの普及により歩行者への接近に気がつくのが遅れて生ずる人身事故の多発が懸念されている。
【解決手段】車に速度検知手段を設け、該速度手検知手段によって車の走行速度を検知し車の速度の増減に連動して、警告音の音量を増減させる。車の接近速度が速い場合音量が大となるため、歩行者は車の接近を早めに察知し身構える余裕が出来き、接触事故を減少させることができる。
(もっと読む)
車両の走行制御装置および車両の走行制御方法
【課題】障害物を回避する走行制御において、制御に対する違和感の低減と、運転者が得られる安心感との両立を図る。
【解決手段】走行制御部39は、生成された回避軌道に基づいて自車両の走行制御(操舵反力制御)を行う。リスク演算部34は、生成された回避軌道を処理対象として、障害物および車両の運動状態に基づいて、リスク(障害物との接触可能性)を演算する。そして、制御量調整部37は、リスクおよび操舵トルクに基づいて、走行制御部39による制御量を調整する。ここで、走行制御部39は、軌道偏差がゼロの状態におけるハンドルの回転位置を基準位置として、この基準位置からのハンドルの回転角度の増加に応じて操舵反力を増加させている。この場合、制御量調整部37は、障害物に対するリスクが大きい程、走行制御部39によるハンドルの回転角度の増加に対する操舵反力の増加量を大きく調整する。
(もっと読む)
画像処理装置、電子装置、および、画像処理方法
【課題】車両に搭載された表示装置に画像を表示する技術を提供する。
【解決手段】
所定の指示信号に応答して、車両の周辺を撮影する複数のカメラから取得される複数の画像に基づいた車両周囲の上方の仮想視点から車両方向をみる合成画像を生成する。この合成画像は、車両の周囲を周回するように仮想視点の位置が段階的に変更された複数の合成画像を表示装置に連続して出力される。これにより、ユーザが車両を目の前にした視点から車両の全周囲を確認することで、1つの画面で直感的に車両と障害物との位置関係を把握できる。
(もっと読む)
2,021 - 2,030 / 7,349
[ Back to top ]