
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,071 - 2,080 / 7,349
周辺表示装置
【課題】自動車などの移動体において周辺の俯瞰画像を表示する場合に、オクルージョン領域の存在を考慮した表示を可能とする周辺表示装置を提供する。
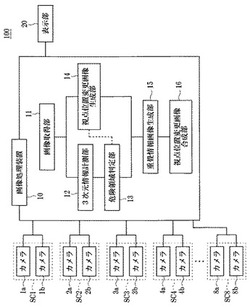
【解決手段】画像処理装置10は、画像データを取り込む画像取得部11と、画像データに基づいて3次元情報を計測する3次元情報計測部12と、画像データの視点位置を変更した視点位置変更画像を作成する視点位置変更画像生成部14と、3次元情報計測部12で計測された3次元情報に基づいて、視点位置変更画像上の3次元情報から障害物のある領域と推定される障害物領域を判定するとともに、その周辺で3次元情報を取得不能な領域を危険領域と判定する危険領域判定部13と、危険領域判定部13での判定結果に基づいて、視点位置変更画像上の危険領域等にマーキングを行う重畳情報画像生成部15と、視点位置変更画像を合成する視点位置変更画像合成部16とを備えている。
(もっと読む)
車載無線通信装置および車車間通信方法

【課題】速度差のある車両との間でも必要な通信を確保でき、かつ、通信量を軽減可能な車車間通信技術を提供する。
【解決手段】車車間通信システムを構成する各車両(車載無線通信装置)は、定期的に自車に関する車両情報を送信するものであり、この送信間隔が自車の車速に応じて設定される。送信間隔は自車の速度が低いほど長く設定される。ここで、自車両よりも速い他の車両から情報を受信した場合には、自車速度に応じて設定された送信タイミングにかかわらずに即座に応答を返すとともに、送信間隔を相手車両の速度に応じた値に設定する。追突事故が起きりうる状況など、相手車両が自車両にとって危険な場合に上記制御を行うことが好適である。また、上記処理を行う車両が自車両を含めて複数台存在する場合には、その台数に応じて上記処理を行う確率を決定することも好ましい。
(もっと読む)
車両用警報装置および車両の警報発生方法
【課題】他車両などの対象物に対して自車両の存在を、適切なタイミングで知らせることができる車両用警報装置を提供すること。
【解決手段】自車両の前方路面上に光線を照射する照射手段20と、前記光線の照射角を調節する照射角度調節手段10と、前記照射角度調節手段を制御して、前記光線の照射角を調節することで、自車両から見た前記前方路面上における前記光線の照射点を、前記前方路面上の所定範囲において、所定の周期で移動させる制御手段10と、を備えることを特徴とする車両用警報装置。
(もっと読む)
車両用画像処理システム
【課題】逆光状態においても車両前方のレーンマークの認識精度を向上させ得る車両用画像処理システムを提供する。
【解決手段】
車両10の前方の路面を撮像する前方カメラ12および後方の路面を撮像する後方カメラ13との撮像画像である前方画像および後方画像に基づく画像処理を実行する車両用画像処理システム100は、逆光判定手段110と、逆光判定手段100により逆光状態であると判定された場合に、前方画像または後方画像のいずれか一方からレーンマーク候補を検出すると共に、検出したレーンマーク候補を残る他方の画像から抽出される画像特徴量と突き合わせることにより、車両10の前方の路面に存在する真のレーンマークを検出するレーンマーク検出手段120とを備える。
(もっと読む)
運転支援装置及びプログラム
【課題】追い越し動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、自車両の走行する第一の車線の前方を走行する他車両を検出し(S101:YES)、他車両が走行している道路を他車両が走行し続けると予測される場合(S102:YES)、当該他車両を対象車両として特定し(S103)、左側追い越し判定処理を行う(S104)。自車両2が、第一の車線よりも道路の中央寄りではない第二の車線に車線変更し、対象車両を追い抜き、所定時間内に対象車両の前方において第一の車線へ車線変更した場合、当該追い越し動作を危険動作と判定する(S106)。これにより、追い越し動作が適正でない場合には危険動作であると判定するので、追い越し動作を適切に評価することができる。
(もっと読む)
移動物体検出装置、及び移動物体検出方法
【課題】環境やシーンの変化に適応しつつ、移動物体と静止物体とを区別する。
【解決手段】画像内で、路面に相当する最下部の所定領域(a)に含まれる特徴点を、路面構造に属する基準特徴点として選出し(ステップS3)、選出した基準特徴点に基づいて自車両の基準姿勢変化量を算出する(ステップS4)。次に、基準特徴点を除いた特徴点の中から、任意の特徴点を比較特徴点として選出し(ステップS5)、選出した比較特徴点に基づいて自車両の比較姿勢変化量を算出する(ステップS6)。そして、基準姿勢変化量と比較姿勢変化量とを三次元座標にマッピングし、基準姿勢変化量の座標位置に対して比較姿勢変化量の座標位置が、所定距離r以上離れているか否かを判定することで、比較姿勢変化量の算出に用いた比較特徴点が移動物体に含まれるか否かを判定する(ステップS7)。
(もっと読む)
無線通信システムにおける環境評価
無線通信システムを取り巻き、送信信号を変曲させる少なくとも一つのインフレクタを含む環境を評価する方法及びシステムが記載される。観測発生装置(300)は、送信機から受信機へ無線通信チャネルを介して送信した入力信号を受信し、また受信機、送信機及びインフレクタの少なくとも一つに関連するシステム状態情報を受信する。観測プロセッサ(302)は、観測発生装置(300)からの観測(303)を使用して、受信した入力信号及びシステム状態情報に基づいてインフレクタの少なくとも一つの特性を評価する。 (もっと読む)
車載用通信装置
【課題】走行地域の運転に不慣れな運転者の存在を他の車両の運転者に認識させて、その運転者が配慮のある運転を可能となり、安全性の高い走行を実現できる車載用通信装置を提供する。
【解決手段】車両に搭載される車載用通信装置において、自車位置に関する情報と、車両の登録ナンバー情報および/または運転者の住所情報に基づき運転慣れ度を決定する運転慣れ度決定部と、前記運転慣れ度決定部が決定した運転慣れ度に応じて自車位置情報を送信するか否かを決定する送信決定部と、前記送信決定部が自車位置情報を送信することを決定した場合、少なくとも自車位置情報を他車両に搭載された車載用通信装置に直接的または間接的に送信する送信部と、を備える車載用通信装置とした。
(もっと読む)
出会い頭衝突防止支援装置
【課題】自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御する。
【解決手段】出会い頭衝突防止支援装置は、他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、車両4の周囲の車両の混雑度が高いほど、情報提供範囲を狭くし、混雑度が小さいほど、情報提供範囲を広くする。
(もっと読む)
運転状態判断装置、及びプログラム
【課題】従来技術と比較して、より正確にドライバの運転状態を判断する。
【解決手段】第1の所定時間内において、ドライバの視界24内の所定の遠方領域20に、検出された視線が第2の所定時間以上停留した第1の回数を演算し(108)、第1の所定時間内において、遠方領域20よりドライバの手前側の近傍領域22に、検出された視線が第2の所定時間以上停留した第2の回数を演算し(112)、第1の回数及び第2の回数の一方を基準としたときの他方の値を示す相対値Eを演算し(114)、そして、相対値Eがドライバが運転に適した状態で移動体を運転した場合に求めた相対値E´を含む所定範囲内の値でない場合に、移動体のドライバの状態が運転に適した状態でないと判断する(116)。
(もっと読む)
2,071 - 2,080 / 7,349
[ Back to top ]