
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
41 - 50 / 7,349
車両用制御装置、特定物体判別装置、特定物体判別方法、特定物体判別プログラム
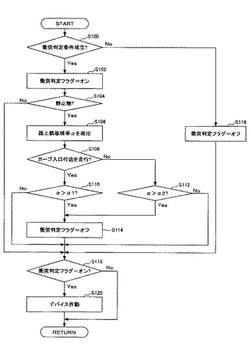
【課題】レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供すること。
【解決手段】位置情報出力手段により出力された反射点の位置情報に基づき、反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように衝突安全制御手段に指示する衝突安全制御キャンセル手段と、を備え、衝突安全制御キャンセル手段は、車両がカーブ路の入口付近を走行していると判定された場合に、車両がカーブ路の入口付近を走行していないと判定された場合に比して、閾値を大きくする車両用制御装置。
(もっと読む)
車両用周辺監視装置

【課題】運転者が車両後方を主体とした周辺の状況を直感的に把握できる自然な画像を出力することが可能な車両用周辺監視装置の提供。
【解決手段】車両用周辺監視装置は、処理装置を含み、処理装置は、現時点の自車位置より所定距離後方に位置するカメラにより撮像した画像に基づいて、自車の前進走行中に、自車に搭載される表示装置に、自車後方から前方に自車を視た画像又は映像(自車後方前向き画像)を出力することを特徴とする。
(もっと読む)
周辺監視装置
【課題】運転者のニーズを見越して周辺映像を適切に表示可能な周辺監視装置を提供する。
【解決手段】周辺監視カメラ11により撮影された周辺映像を表示する装置であって、周辺映像を表示する表示装置15と、運転操作の意図を検知する検知部21と、運転操作の実施を判定する判定部22と、運転操作の意図が検知されると、周辺映像を縮小表示し、運転操作が開始されると、周辺映像を拡大表示し、運転操作が収束すると、周辺映像の表示を終了するように、表示装置15を制御する表示制御部23とを備える。よって、運転操作の開始前に周辺映像の表示を開始し、運転操作の終了前に周辺映像の表示を終了するので、運転者のニーズを見越して周辺映像を適切に表示することができる。
(もっと読む)
車間距離制御装置
【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
車線変更支援装置
【課題】より安全性の高いECOモード走行時の車線変更を実現する。
【解決手段】ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、より安全性の高いECOモード走行時の車線変更を実現する。
(もっと読む)
画像処理装置、サーバ、携帯端末装置、及び画像処理方法
【課題】渋滞時においても走行速度の増減により画質を切り替える場合でも、表示させる撮像画像としての品質を向上する。
【解決手段】最終的な画質設定値である明るさ出力値Lが、次信号離間距離Dに応じた明るさ切片値Cが設定される停車状態(V=0)と、参照設定値Lcに固定された走行速度域(V≧Vs)との間に、明るさ出力値Lを車両速度Vに対応して連続的に変化させる連続変化速度領域(0<V<Vs)を設けている。この連続変化速度領域においては、当該連続変化速度領域を挟む2つの固定速度領域(V=0、V≧Vs)のそれぞれに固定的に設定されている明るさ出力値Ls,Lcの間で車両速度Vに対し線形比例するよう明るさ出力値Lを変化させている。また明るさ切片値Cは、車両100が信号機200に近づくに従って変化させている。
(もっと読む)
障害物計測方法、障害物計測装置及び障害物計測システム
【課題】高速・低速に関わらず、単位時間あたりの演算量が一定になり、単位時間あたりの演算量の上限が規定され、ハード処理・ソフト処理のいずれにおいてもコストダウンを達成可能な障害物計測方法、障害物計測装置及び障害物計測システムを提供する。
【解決手段】この障害物計測方法は、走行物体から障害物までの距離をステレオカメラにより計測する際に、障害物計測の対象領域及びステレオカメラによる画像のフレームレートまたは解像度を走行物体の速度に応じて変化させる。
(もっと読む)
41 - 50 / 7,349
[ Back to top ]