
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
6,291 - 6,300 / 7,349
車両周囲状況表示システム、車両周囲状況表示方法、およびプログラム
【課題】前の車両に遮られて見ることのできない範囲の道路状況を各車両の利用者に提供すること。
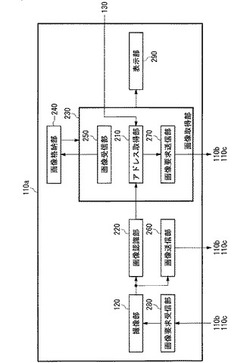
【解決手段】本発明に係る車両周囲状況表示システムは、自車に設置され、自車の前方を走行する他車のナンバープレートを撮像する自車撮像部と、自車撮像部が撮像したナンバープレートのナンバープレート番号を認識する画像認識部と、画像認識部が認識したナンバープレート番号に基づいて、当該ナンバープレート番号で識別される、自車の前方を走行する他車に設置された他車撮像部によって撮像された画像を検索して取得する画像取得部と、自車に設置され、画像取得部が取得した、他車の前方が撮像された画像を自車の運転者に対して表示する表示部とを備える。
(もっと読む)
車両の報知装置

【課題】 他の車両の自車両への接近を自車両の運転者に必要十分に報知できるとともに接近する他の車両の運転者に対して適切且つ効果的に報知可能な車両の報知装置を提供する。
【解決手段】 自車両(1)に接近する他の車両の接近状態を検出する接近状態検出手段(10)と、自車両の車室内に設置されているスイッチ(20)に設けられたランプ(22)と、自車両の外側に外部報知手段(40,50,60)と、接近状態検出手段の検出結果に基づいて上記ランプを点滅または点灯させるとともに、上記ランプの点滅または点灯中に上記スイッチが操作されると、接近状態検出手段の検出結果に応じて外部報知手段を作動させる制御手段(2)とを備える。
(もっと読む)
走行支援装置および走行支援方法
【課題】 車両周囲の建造物や壁などの影響により、通信エリアが狭められるようなことがあったとしても、交差点での安全かつスムーズな合流を実現するための走行支援装置を提供する。
【解決手段】 自車両周囲の建造物等の影響で、他車両との通信範囲が狭く、通信手段によるメッセージの授受を行うことを前提として合流時の危険度推定を行う合流支援モードでの効果的な走行支援の実行が困難な場合には、メッセージ情報の授受を俟つことなく当該交差位置付近における他車両の存在有無に係る情報を提供する頭出し支援モードでの走行支援を実行することができ、頭出し支援モードでの走行支援によって、合流支援モードでの走行支援を効果的に実行可能な位置まで、自車両の頭出し運転操作を安全に行う。
(もっと読む)
車両と歩行者との衝突を予測するための方法及びシステム
本発明は、車両と検出された移動中の歩行者との衝突を予測する方法に関し、本方法では、モンテカルロ法に従って車両の軌道と歩行者の軌道の対を表わすN個の粒子を生成し、次に、各粒子の結果を評価して、各粒子の状態がつくる空間を、粒子の現在の運動状態に応じて重要度が異なる領域に分割し、衝突が発生しないと予測される場合に、現時点での粒子の重要度と直前の時点での粒子の重要度との関係を計算し、粒子の重要度が増大する場合はそれぞれ新規の重みを付けた粒子の数を2以上の整数に減少させることを決定し、粒子の重要度が低下する場合は前記重要度の関係に従って、粒子が残存する可能性が重要度の関係に等しくなるように粒子をランダムに除外することを決定し、前記予測される衝突の確率の推定が、N個の粒子の結果に基づく統計により取得される。 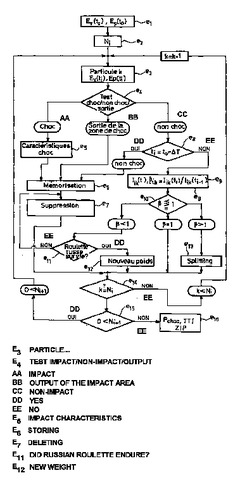 (もっと読む)
(もっと読む)
危険反応地点記録システム及び運転支援システム
【課題】 実際に車両が道路を走行する箇所の周辺状況に応じて、危険状況の認識をより具体的に行うことができる危険反応地点記録システムを提供する。
【解決手段】 ナビゲーション装置2を制御する車載機本体6において、運転特性記録部18は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、ヒヤリハット反応が生じたと判定する。そして、ヒヤリハット反応が生じた時点の前後において周辺監視カメラ14により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、運転特性記録部18は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して車両の位置と共にヒヤリハット情報を記録する。
(もっと読む)
車々間通信装置、車々間通信システムおよび動画情報のアプリケーション適用可否判断方法
【課題】 車々間通信によって通信される動画情報を、適切に利用可能なアプリケーションに対してのみ適用することが可能な「車々間通信装置、車々間通信システムおよび動画情報のアプリケーション適用可否判断方法」を提供する。
【解決手段】 動画情報を車両間で通信する際に、第1の車両100から第2の車両200に動画情報が送られるまでの遅延時間を遅延時間取得部11により求め、そのような遅延時間を持って送られてくる動画情報を第2の車両200のアプリケーションで利用可能かどうかを適用可否判断部23により判断することにより、車載機2で適切に利用可能なアプリケーションに対してのみ動画情報を適用することができるようにする。
(もっと読む)
車両制御装置および車両ネットワークシステム
【課題】 安定した十分な車両のリスク管理を可能とする車両制御装置および車両ネットワークシステムを提供すること。
【解決手段】 各車両には車両制御装置1〜4が設けられ、周辺車両との間で無線によるネットワーク5を構築する。各種センサ12を使用して自車両の運行状況を収集し、周辺車両の運行状況をネットワーク5を介して取得し、それらに基づき各車両のリスクの度合いを演算し、演算された各車両のリスクの度合いに基づき自車両のリスクの度合いが最も小さい場合に自車両をネットワーク5内の親として決定し、親として決定された場合は、演算されたリスクの度合いと自車両の運行状況と周辺車両の運行状況とに基づき各車両のリスク回避方法を演算し、演算された周辺車両のリスク回避方法をネットワーク5を介して周辺車両に通知する。通知された周辺車両および自車両は、通知されたリスク回避方法に基づき、リスク回避のための処理を行う。
(もっと読む)
後方監視装置
【課題】車両後方確認に際し、ドライバーの目視による認識性を向上させる。
【解決手段】車両後方の所定の高さにある超音波振動子から超音波が車両の上部位置から水平方向に拡散されるから、受波超音波用振動子より低い物について障害物として照射せず、送波用超音波振動子ユニットで撮像する車両後方に受波用超音波振動子の位置より高い障害物があると、超音波が照射され、これを受波用振動子での入力超音波信号を映像信号に変換して、所定以上の超音波反射信号がある場合にその画像部分に所定の色をあたえるから、ドライバーにたいして障害物の位置を明確にモニタ上に示すことができ、さらに、その画像部分の位置に基づいて車両から超音波照射対象物までの距離を得るから、モニタに示された障害物までの距離を知ることができる。
(もっと読む)
車両制御装置
【課題】 交差点を安全且つ必要最低限の減速でスムーズに通過できるようにする車両制御装置を提供すること。
【解決手段】 車両において制動制御を行う車両制御装置が、自車両前方交差点において自車両と交錯可能性を有する他車両(交錯車両)が検出されたときに、該交差点の通過に関して自車両及び該他車両に優先度を設定し、自車両が該他車両に対して非優先の場合(優先度が相対的に低い場合)、該他車両が上記交差点を通過してから自車両が該交差点を通過するように自車両の制動制御を実行する。
(もっと読む)
車室内の音警報システム
【課題】
複数の他車が接近しても、それぞれの接近他車を運転者に正しく認知させる。
【解決手段】
車両1000の前後左右のうち少なくとも2方向に車外周辺物または車外接近物の少なくともいずれか一方の存在有無及び相対距離の情報を出力する複数のセンサ10と、運転者50の頭上のルーフ部に設けられた複数の音発生源40と、複数のセンサ10からの情報に基づいて車外接近物の車両に対する方向を求め、求められた当該方向に応じた複数の音発生源40を選択し、選択された音発生源40に対して音発生指令を出力する制御装置70を有する。
(もっと読む)
6,291 - 6,300 / 7,349
[ Back to top ]