
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,161 - 7,170 / 7,349
車両の走行制御装置
【課題】
この発明は、先行車の走行状態を検出することで、予め先方の道路形状を予測検出して、自車の走行状態を制御する車両の走行制御装置において、加減速度の道路勾配に応じた補正のタイミングを適切にすることにより、運転者に違和感又は不安感を感じさせない車両の走行制御装置を提供することを目的とする。
【解決手段】
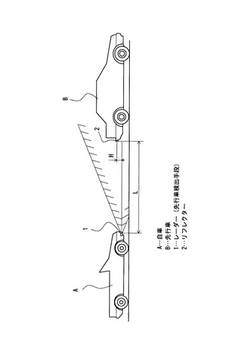
車両の加減速制御を行う車両の走行制御装置であって、レーダー波を自車Aの前方に発信して、先行車Bからの反射波に基づき、先行車Bとの距離L、相対速度ΔV及び先行車Bの高さHを検出するレーダー1と、前記先行車Bとの距離Lが目標距離となるよう実距離と目標距離との偏差に応じて車両の目標加速度を設定し、当該目標加速度になるように車両の走行装置であるエンジンや自動変速機を制御するコントローラーと、前記先行車Bの高さHの変化に基づき、自車A前方に存在する坂道極点(坂道の勾配開始地点)を算出し、当該坂道極点までの距離がゼロとなった時に、当該坂道の属性に応じて前記目標加速度を補正するコントローラー(加速度補正手段)とを備えたものである。
(もっと読む)
車両用物体検知装置

【課題】 移動可能な物体に対する検知漏れを低減する車両用物体検知装置の提供を目的とする。
【解決手段】 車両に搭載され、車両の周囲の物体を検知する物体検知装置において、物体の位置を検出する位置検出手段と、物体が移動可能な物体か否か判定する物体判定手段と、物体判定手段において物体が移動可能な物体と判定された場合に、物体位置検出手段において検出された物体の位置を基準として、物体を取り囲む所定の領域を常時設定する領域設定手段とを有する。
(もっと読む)
車両ガイドシステム
交通状況を表す入力量(V,e1,ek,di,vri,φi)に従って,かつ動的に変化可能なパラメータに従って,車両をガイドするための操作量(am,ab)を用意する方法は,複数の入力量のセットから,唯一の評価量(g)が形成され,かつパラメータの複数のものが,同一の評価量を用いて定められることを特徴としている。 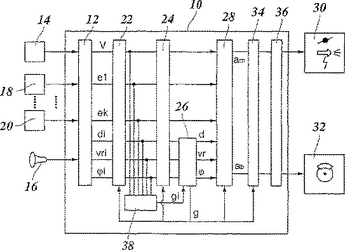 (もっと読む)
(もっと読む)
運転支援情報提供装置および方法
【課題】 対向車表示画面と歩行者表示画面とを提供する際に、運転者に与える混乱を極力小さくし、かつ、表示画面の内容を運転者ができるだけ短い時間で認識することが可能な「運転支援情報提供装置および方法」を提供する。
【解決手段】 車両の停止/進行を検出し、その検出結果に応じて、対向車表示画像と歩行者表示画像とのどちらを主表示画像とするかを決定する主表示画像決定部17と、対向車表示画像と歩行者表示画像とを共に全画面に同時に表示し、その表示の際に、主表示画像でない方の画像の濃度を薄くして表示するように制御する画像合成部18とを備えることにより、両画像の表示サイズを大きくして表示内容を読み取りやすくするとともに、自車両の停止/進行に応じて画像が切り替えられたときでも、切り替わり前に既に薄く表示されている画像を先行手がかりとして切り替わり後の画像を簡単に認識することができるようにする。
(もっと読む)
車両用走行制御装置
【課題】 追従モードの移行を容易にする。
【解決手段】 先行車追従走行制御を行う全車速領域を低速領域と高速領域の少なくとも2つの車速領域に区分し、低速領域において、先行車が検出されている場合は車間距離を保って先行車に追従走行するとともに、先行車が検出されていない場合は追従走行を解除する低速追従モードと、高速領域において、先行車が検出されている場合は設定車速を上限として車間距離を保って先行車に追従走行する制御を行うとともに、先行車が検出されていない場合は設定車速一定で定速走行する高速追従モードと、全車速領域において、所定の操作部材が操作されている間、設定車速に関わらず車間距離を保って先行車に追従走行する優先追従モードとを有する。
(もっと読む)
車両周辺監視システム
【課題】 車両周辺の歩行者を検出する場合の誤検出を適切に抑えることができ、車両周辺の歩行者を適切に検出する。
【解決手段】 車両周辺監視システム1は、撮影画像にあって車両直近の部分を検知領域として設定し、その検知領域として設定された部分を画像処理して車両付近に歩行者が存在するか否かを判定する。撮影画像にあって車両直近の部分、つまり、運転に支障のある部分を画像処理して歩行者が存在するか否かを判定できる一方で、運転に支障のない部分を画像処理して歩行者が存在するか否かを判定してしまうことを未然に回避できる。
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】撮像装置の自車前方の撮影画像から、自車の走行状態による誤認識なく、しかも、FOEを用いた画像処理を行なうことなく、自車前方の停止中の先行車等の静止状態の障害物を精度よく確実に認識する。
【解決手段】自車1に搭載された単眼カメラ2の自車前方の撮影画像の垂直エッジにつき、車幅方向のヒストグラムの各ピーク点のトラッキング画像を形成し、自車1の直進走行状態を検出したときに、トラッキング画像の全部または一部の2ピーク点の間隔の時間変化から各撮影画像側幅拡大率を算出し、自車速を時間積分した自車の走行距離と、自車から自車前方の静止状態の障害物までの間隔距離としての各候補距離それぞれとに基く演算から、候補距離毎に演算側幅拡大率を算出し、誤差が最小になる組み合わせの演算側幅拡大率の候補距離を前記間隔距離の測定距離に決定して障害物を認識する。
(もっと読む)
障害物検知装置
【課題】 復帰可能な通信異常の発生時において、復帰させるための処理に要する時間を考慮することなく通信異常から復帰させること。
【解決手段】 センサの作動を禁止する禁止条件に該当する場合、処理ユニットとの通信を停止したセンサが少なくとも1つあれば、全てのセンサに対し再度パラメータ設定処理を実行する(S610)。次に、通信を再開させたセンサにおいてパラメータが正常に設定されたか否かを判定し(S620)、正常に設定された場合には、状態フラグを「正常:0」にセットし、S400へ処理を移行する。これにより、次回のS400の処理において作動条件に該当すると判定された後、S500以降の処理において、通信を再開させたセンサによる障害物検知が行われるようになる。
(もっと読む)
車両の認知支援装置
【課題】 自車両に対し相対的に危険度の高い物体の存在を運転者に適切に認識させる。
【解決手段】 合成画像生成部30は、外界センサ12から入力される画像データに拡大画像取得部22から入力される対象物の拡大画像を合成して合成画像を生成する。画像表示制御部31は、少なくとも、視認難易度判定部25にて算出した視認性の難度が所定難度を超えていると判定された場合、または、危険度判定部28にて算出した危険度が所定危険度を超えていると判定された場合には、合成画像生成部30にて生成された合成画像を前方表示装置15または後方表示装置16へ出力する。
(もっと読む)
運転支援装置
【課題】表示画像上における自車の進路と障害物との位置関係等を容易に把握することができる運転支援装置を提供する。
【解決手段】この運転支援装置では、車両前端左側コーナ部周辺の撮像画像にポール画像13a〜13cが付与された予測進路画像(L1,L2)が重畳されて表示される。ポール画像13a〜13cには、少なくとも1箇所の高さ位置に目盛線21が付与されている。予測進路画像して、ハンドル切れ角がゼロである場合の予測進路を表す直進対応進路画像L1と、実際のハンドル切れ角に対応した予測進路を表す切れ角対応進路画像L2とが表示される。
(もっと読む)
7,161 - 7,170 / 7,349
[ Back to top ]