
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,201 - 7,210 / 7,349
運転支援装置
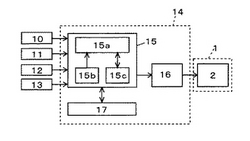
【課題】 運転者が先行走行情報である車両前方の走路の形状を把握しやすく、前記走路の状況を瞬時に認識することが可能な運転支援装置を提供すること。
【解決手段】 三次元情報からなる地図情報を記憶する記憶手段12と、前記地図情報を表示する表示ユニット1と、自車両の現在地位を検出するGPS電波受信部11と、GPS電波受信部11により検出された前記自車両の現在位置に基づいて前記地図情報を読み出して表示ユニット1に前記自車両の経路を表示する制御手段14と、備えた運転支援装置に関する。制御手段14は、GPS電波受信部11からの位置情報に基づいて自車両位置地心座標P1を算出し、この自車両位置地心座標P1と地球中心座標P0とに基づいて視点基準座標P2を算出し、この視点基準座標P2から前記自車両の進行方向における前記経路に関する走路形状を表示ユニット1を介して表示させる。
(もっと読む)
車両のレーン走行支援装置

【課題】 ナビゲーション装置の検出情報を活用し、車両がカーブに進入する前に、進行方向の道路の曲率に基づきレーン走行支援を中断し得る安価な装置を提供する。
【解決手段】 操舵制御手段(電動パワーステアリングシステム)と、走行レーン検出手段(カメラ等)を備え、その検出結果と車両の操舵状態及び走行状態に応じて、修正操舵を行ない車両の走行レーン内の走行を支援する。特に、ナビゲーション装置NAVによって検出される車両進行方向の道路形状情報に基づき道路曲率を演算し、車両の自車位置での道路曲率が所定の直進基準曲率以下の状態で、車両進行方向の最大の道路曲率が所定の最大曲率以上である場合、及び車両進行方向の最小のクロソイド係数が所定の最小クロソイド係数以下である場合の少なくとも一方の場合には、走行支援を中断する。
(もっと読む)
車載用レーダ
【課題】
車載レーダにおいて、路面・自車・レーダ自身に起因するノイズを低減し、小型軽量かつ低コストでロードクラッタを防止し、検知性能を向上させたレーダ装置を提供する。
【解決手段】
直線偏波を放射する1又は複数の放射素子を有したアンテナと、このアンテナ面の前方に配置された金属板に複数のスリットを設けたスリット板と、アンテナとスリット板の間に発泡材を設けたことを特徴とする。
【効果】
アンテナの給電線路からの交差偏波が主成分となるサイドローブを低減でき、ロードクラッタを防止できる。また、固有振動数が車両の振動数以下となるスリットの共振を低減し、ノイズを抑制することができる。それによって、レーダ装置として優れた検知性能が得られる。
(もっと読む)
自動駐車システム
【課題】 駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化することにより、空き駐車区画への車両誘導を正確且つ迅速に行うこと。
【解決手段】 駐車管理センタ3は、駐車場入口から進入した車両2に対して、空き駐車区画内の車両停止位置までの車両走行経路(a〜fの何れか)に対応した経緯度情報を含む経路情報を送信する。車両2には、自車両の現在位置を示す測位情報を高精度測位する測位情報検知手段5及び6が搭載されていると共に、それら測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置が搭載されている。
(もっと読む)
車間距離制御装置
【課題】車間距離制御中は加速或いは減速指示があると円滑に、且つ、早急に減
速ができる車間距離制御装置を提供する。
【解決手段】運転者の加速要求或いは減速要求に応じて増加或いは減速された設
定速度に自車の速度が一致するように現在の速度を調整し、更に、前車との車間
距離を予め設定した車間距離になるように自車の速度を調整し、車間距離を制御
する車間距離制御手段を備えた車間距離制御装置において、車間距離制御中に加
速要求を検出しても、この要求を無視し、一方、減速要求を検出したときは、設
定速度を減速要求を検出した時点の現在の自車の速度として更新する手段を備え
、更新された設定速度に基いて自車の速度を減速側に調整する。
(もっと読む)
車両の路面標識検出装置
【課題】 路面標識の認識精度を向上させる。
【解決手段】 検知ライン設定部24は外界撮像カメラ11から入力される画像データ上において、道路形状認識部23にて検知された自車両の走行路R内に、この走行路Rに沿って伸びる複数の検知ラインD1,…,Dk,…,Dn(設定数nは任意の自然数であって、自然数kは1≦k≦n)を走行路Rの幅方向に所定間隔をおいて設定する。明るさ検知部25は各検知ラインD1,…,Dk,…,Dn毎に長さ方向における明るさ(例えば、輝度や明度等)の変化を検知する。路面標識認識部26は、明るさ検知部25にて検知された各検知ラインD1,…,Dk,…,Dn毎の長さ方向における明るさの変化位置に基づき、所定の路面標識(例えば、停止線等)の有無および路面標識までの距離を検知する。
(もっと読む)
運転モニタシステム及び方法
一組の車両からの未加工データストリームは、外来ノイズを除去するためにフィルタリングされ、そしてそのストリームを一連の運転イベント基本命令に変換するために解析される。そして、この一連の運転イベントは、一連の高レベルの運転操作を得るためにパターン認識システムにより処理される。運転操作は、レーンチェンジ、追い越し、そして方向転換およびブレーキのような良く知られた行為を含む。運転イベントおよび操作は、センサのデータから作成されたパラメータによって定量化される。このパラメータと運転操作のタイミングは、運転者の能力と安全等級を評価するための技能および姿勢ファクターを判定するために分析される。そのデータを共通運転関連のコンセプトに翻訳することは通常の静的な閾値ベースの分析に比べてより正確で意味のある分析及び評価を可能とする。 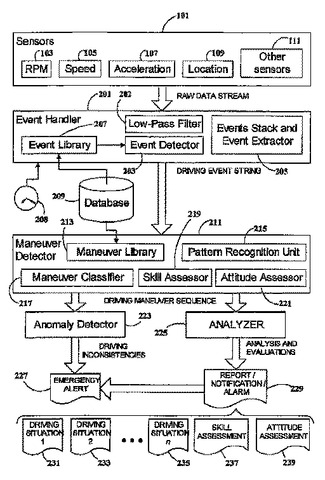 (もっと読む)
(もっと読む)
監視システム
【課題】 監視領域や踏切において人や車両を確実かつ正確に検知し、監視者や運転手に的確に報知する監視システムを提供する。
【解決手段】 監視領域を挟んで一方の側に検出媒体の送信を行う送信手段及び該検出媒体の受信を行う受信手段を配置し、他方の側に検出媒体を反射する反射手段を配置して送信手段から反射手段に向けて検出媒体を常時送信し、受信手段で受信するとともに、受信信号毎にその反射位置を算出し、かつ、反射手段で反射された検出媒体に基づく基準受信信号については、その受信強度のまま、もしくは増幅して出力し、反射手段以外で反射された検出媒体に基づく受信信号については、その受信強度のまま、もしくは減衰させて出力し、基準受信信号が途絶えるか、減衰したときに、監視領域に被検出物体が存在することを検知する。
(もっと読む)
車両の走行支援装置
【課題】 自車両周辺の外界の状況を精度良く検知し、自車両の走行支援を適切に行う。
【解決手段】 受信電力検知部25は情報送受信部12にて受信した対象物情報の受信電力を発信元である各他車両毎に算出する。受信電力算出部29は自車両と他車両との相対距離に応じて、自車両と他車両との車車間通信で検知される受信電力を算出する。見通し判定部30は受信電力検知部25にて検知された各他車両毎の受信電力と、受信電力算出部29にて算出された受信電力とを比較し、自車両と他車両との間の相対的な見通し状態を推定する。走行支援判定部31は自車両と他車両との相対的な見通し状態と、道路形状認識部26にて検知された自車両の進行方向の道路形状と、相対速度判定部28にて算出された自車両と他車両との相対速度とに基づき、走行支援レベルを設定し、走行支援レベルに応じて制動装置16および警報装置17を作動させる。
(もっと読む)
車両用危険通知処置装置
【課題】危険の発生およびその対処方法を乗員に通知するとともに、車両自らが対応処置を実施することにより、乗員が危険を容易に回避できるようにする。
【解決手段】異常状態検出手段1が車両および車両周辺を監視して異常状態を検出すると、危険判定手段2が、検出された異常状態が乗員にとって危険であるかどうかを判定する。危険であると判定された場合には、通知手段3は、車両装備および/または周辺施設を用いて対処方法を乗員に通知し、処置手段4は、車両装備を用いて対応処置を実施する。
(もっと読む)
7,201 - 7,210 / 7,349
[ Back to top ]