
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,241 - 7,250 / 7,349
障害物検知支援装置

【課題】車外の障害物の位置を、立体音声により使用者に報知する。
【解決手段】車両10の外部に設けられ、車両の周囲の状況を画像として取得するカメラ3F、3R・・と、車両に対して着脱自在に設けられた画像表示装置1Bと、画像表示装置1Bの位置を検出する位置検出装置7と、スピーカー2F、2Rを備え、位置検出装置7で検出された位置に基づいて、使用者の視点から画像表示装置1Bへ向かう延長線上の、車両周囲状況を、カメラ3F・・で取得した画像から切り出し、画像表示装置1Bのディスプレイに表示するとともに、取得された画像から障害物を検出し、該障害物の位置を立体音声によって、使用者に報知する。
(もっと読む)
車両の側方周囲の、ビデオベースの監視及び測定のための方法及び装置
初期の市販の運転者支援システムにおいては、適用形態により、走査の解像度と走査される領域の大きさのどちらを重要視するかを考える必要がある。従来のビデオベースのシステムは、解像度と記録範囲の両方を十分兼ね備えてはいるが、一般に、直接の距離情報を供給しない。本発明の目的を有する新規な設備によれば、路上走行車内に設置した場合には、複雑かつダイナミックな場面、たとえば、ダイナミックに動作している車両の視点から、道路の縁に対する側方の3D幾何学的形状を記録し、駐車する際にこれを利用することができるシステムを実現することができる。本発明によれば、車両の側方周囲の監視及び測定は、一方では、ディジタル画像を備えたカメラにより、他方では、画像にタイムスタンプを提供し、かつこれをバッファ処理するよう機能するコンピュータユニットにより表示される。車両の移動は、上記のデータに基づいて、バッファ処理された画像から画像の対を選択するために、さらに記録される。したがって、車両の側方周囲の局所3D深さ画像が、立体画像処理用のアルゴリズムによって生成できる。 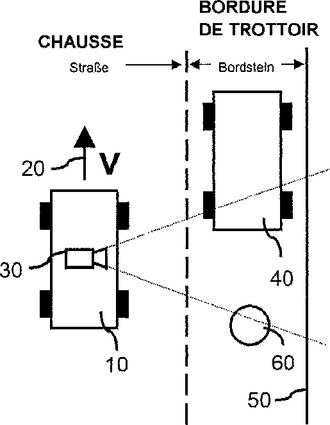 (もっと読む)
(もっと読む)
車両追突防護装置

【課題】駐車場に駐車している駐車車両に対する追突および当て逃げから防護することができること。
【解決手段】駐車中の駐車車両1を他車両2の追突から防護する車両追突防護装置20であって、レーダ装置12および撮像装置14は、駐車車両1の駐車領域を含む防護領域の監視をし、他車両対応部2081は、レーダ装置12および撮像装置14による監視結果、例えば、他車両が防護領域に侵入した、駐車車両1に追突すると推定される、または駐車車両1に追突したなどの監視結果に応じて警告、車両制御支援、防護領域情報提供または画像撮影などの対応をする。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
車両用距離判別装置
【課題】 車両と障害物との距離と目標距離とのずれ量を運転者が視覚により定量的に把握することが容易な車両用の距離判別装置を提供する。
【解決手段】 障害物3に対して所定の投影パターンP1、P2を投影する投影装置21、22が車両1に搭載されている。各投影装置21、22の投影軸A1、A2は、車両1から距離X1離れたC点で交差するように配置されている。そして、距離X1は、投影装置21、22間の距離Y1と略同一に設定されている。このため、障害物3の壁面30に投影された投影パターンP1、P2間の距離Y2は、C点と壁面30との距離X2に略一致する。
(もっと読む)
車両用走行支援装置
【課題】 車両の適切な誘導を図りながら、操舵手段の動きに対するドライバの違和感を低減することが可能な走行支援装置を提供する。
【解決手段】 車両用走行支援装置100は、初期位置から目標位置までの目標移動軌跡に沿って走行するように車両の走行を支援する。この装置100は、目標移動軌跡に沿って車両が走行するように転舵手段32の転舵角を制御するための制御パターンを生成する転舵角制御パターン生成手段12と、操舵手段32の操舵角を制御するための制御パターンを生成する操舵角制御パターン生成手段12と、転舵角の制御パターンに基づいて転舵手段32を制御し、操舵角の制御パターンに基づいて操舵手段22を制御する制御手段20,30と、を備える。
(もっと読む)
カーブ区間検出装置
【課題】カーブ区間の存在を、確実に判定することのできるカーブ区間検出装置を提供する。
【解決手段】観測地点の前方の道路にある連続する複数のノードN1〜N4を取得し、前記取得されたノードとノードを結ぶリンクLa,Lb,Lcの長さa,b,cと、リンク同士の交わる角度α,βを用いて、リンクの長さa,b,cが開始リンク距離の閾値よりも小さく、リンク同士の交わる角度が開始リンク交差角の閾値よりも大きいという判定が2回連続した場合に、カーブ開始と判断する。
【効果】リンク同士の交わる交差角だけでなく、リンク長を加味することにより、実際の走行感覚に近いカーブ形状を、確実に検出することができる。
(もっと読む)
道路標識認識装置
【課題】 CPU、撮像装置の能力、コストを抑制し、車両へ現実的に搭載でき、確実に道路標識を認識することができる道路標識認識装置を提供すること。
【解決手段】 自車前方を撮像するステレオカメラ5と、撮像した画像を撮像対象までの距離を示す距離画像に変換する距離画像作成部21と、撮像した画像から道路標識部分を認識するデータ探索部42と、複数の道路標識のデータを有するテンプレートデータと、画像の道路標識部分とテンプレートデータとのマッチングを行い、道路標識を認識する画像判定部44とを備える道路標識認識装置1において、自車と道路標識との距離により段階的にテンプレートサイズを変更するテンプレート拡大縮小部44を設け、画像判定部44は、自車と道路標識との距離により段階的に認識処理を行う。
(もっと読む)
移動体ネットワークを使用した車両情報管理システム
【課題】
運転時に乗務員がどのような運転をしているか、輸送車がどのような状態にあるかの各種情報を、管理者側と乗務員側がリアルタイムで共有できるようにする。
【解決手段】
道路輸送管理システムSは、輸送トラック1、車載コンピュータ2、パケット通信網3、サーバ4及び管理者側コンピュータ5により構成されている。輸送トラック1の冷凍庫10と冷蔵庫11には温度計12,13が設けられおり、スピードメータ14と回転計15からは各情報を検出できる。燃料噴射ポンプへ燃料を送る送給管には送り流量計16が設けられ、返送管には戻し流量計17が設けられている。各検出情報はインターフェースボックス18へ送られ、更に車載コンピュータ2へ送られる。車載コンピュータ2はディスプレイ23を有し、パケット通信用チップ20とGPS受信機21及びメモリカード22が装着され、情報をサーバ4に送る。管理者側コンピュータ5はインターネット上のサーバ4にアクセスして情報を得る。
(もっと読む)
運転状況判定装置
【課題】 危険状態の程度に応じて運転者にその危険状態を認識させ、危険状態を回避すべき運転操作をより早く行わせること等を実現するため、現在の運転状況をより多様に判定する運転状況判定装置を提供する。
【解決手段】
車両に搭載された運転状況判定装置が、取得した様々な情報に基づき、自車両と衝突可能性のある障害物を認識し、その障害物と自車両との間の相対距離及び相対速度に基づき、判定条件の異なる複数種類の危険判定を行い、自車両がどの領域(危険の程度によって分けられた領域)に属するかを判定する。そして、その判定結果を様々な他装置に出力する。この結果、様々な他装置が独自に情報を収集して動作可否を判断するよりも、運転状況判定装置の判定結果を利用して動作する場合のほうが他装置は効率的かつ協調的に機能し、結果として安全性が高まる。
(もっと読む)
7,241 - 7,250 / 7,349
[ Back to top ]