
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,271 - 7,280 / 7,349
障害物検出装置の動作を制御するシステムと方法
【課題】 自動車の車外障害物/乗員検出装置を制御するシステムと方法を提供する。
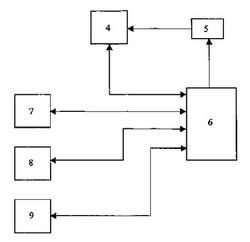
【解決手段】 本発明のシステムは、車外障害物検出装置(4)と、電子システム(6)と、状態検出手段(7)とを有する。車外障害物検出装置(4)は、自動車の周囲の所定の観測領域に入った障害物を検出する。状態検出手段(7)は、自動車のドアの開閉状態を検出し、電子システム(6)と協働する。これにより電源(5)を制御する。選択的事項として、乗員検出装置(8)と傾斜状態検出装置(9)がこのシステムに含まれ、制御動作が行われている間、それらの出力が考慮に入れられる。本発明のシステムは、駐車した時の車の傾斜状態に応じて観測領域を変える。
(もっと読む)
カメラの画像を図形的に処理するための方法および警告装置
【課題】この発明は、自動車両の周辺の、カメラ手段によって提供された画像を、図形的に処理する方法に関する。
【解決手段】その画像は、周辺にある障害物から生じる、自動車両に対する危険性が、ドライバーによって光学的に視覚化され、またはドライバーのために強調されるように、処理される。この発明によれば、カメラ手段によって提供された画像は、ドライバーのために一層明瞭に危険性を強調するために、画像における障害物の位置を考慮して処理される。この目的のために、自動車両の周辺における障害物の実際の位置は、はじめに決定される。続いて、周辺における障害物の実際の位置に対応する、画像における障害物の位置が決定される。
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 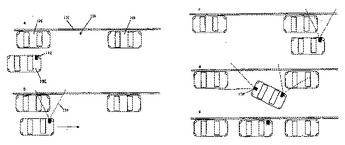 (もっと読む)
(もっと読む)
車両のための操作方法
車両の操作方法に際して、ドライバーの健康状態が検出され、対応する信号が出力される。本発明に係る方法では、いつでも作動可能な装置が車両に備えられ、当該装置を用いてドライバーや他の乗員の身体コンディションが積極的に影響を与えられ得、及び/又は発生するストレスに反対作用し得るものである。 (もっと読む)
車両用表示装置、車両、表示方法、画像表示プログラム、および記録媒体
図1(a)に示すスピードメーター11が運転者の正面になるように画面10を配置する。右折指示を検出すると、図1(b)に示すように、ウインカー17を表示させるとともに右後方画像18を画面10の右側に表示する。左折指示を検出すると、図1(c)に示すように、ウインカー19を表示させるとともに左後方画像20を画面10の左側に表示する。左右に応じて異なる位置に表示させるので、直感的把握が容易となり、操作性を向上できる。すなわち、自動車に搭載される表示装置によって、自動車の操作性を確実に向上させる。 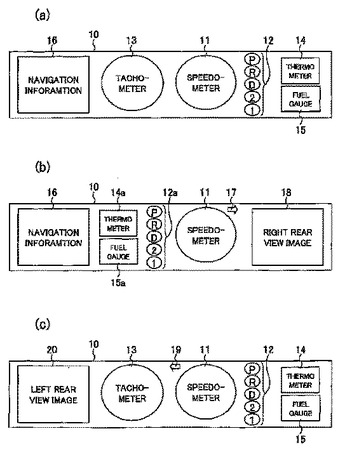 (もっと読む)
(もっと読む)
状況検出表示システム、状況検出表示方法、状況検出表示システム制御プログラム、および当該プログラムを記録した記録媒体
状況検出表示システム(100)では、全方位カメラ(1)、車内センサ類(3)、車外センサ類(4)などによって自車およびその周囲の状況を検出し、検出した結果を示す画像データであって、自車の画像を含む画像データを画像用DB(6)から選択して、液晶パネル(7)における速度計の表示に近接する位置に表示する。 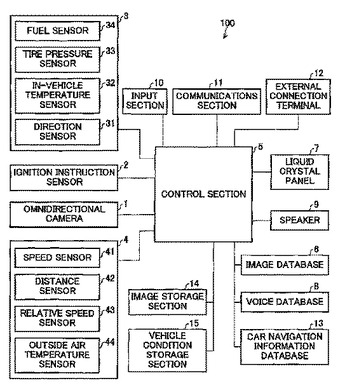 (もっと読む)
(もっと読む)
自動車の間隔制御システム

目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
車中のドライバの運転能力を測定するための装置
ドライバの眼の少なくとも一つを照らすための照明装置(1)と、照らされた眼の像を撮影するための画像撮影装置(2)と、画像撮影装置により撮影された像の評価を行うための評価装置(3)と、データ記憶装置(4)を有する、車のドライバの運転能力を測定するための装置が記載される。装置は基本的に、照明装置(1)が、ドライバの眼の少なくとも一つをフラッシュ型の光を用いてもしくは断続的に照らすことと、評価装置(3)が、画像撮影装置(2)によって撮影されたドライバの瞳孔反応用の測定値を、データ記憶装置(4)に保存された瞳孔反応用の少なくとも一つの標準値と比較することと、瞳孔反応用の測定値が標準値に達しないとき、車が起動しないように、もしくは運転状態の車が停止した後に運転されないように、制御装置(5)に影響を及ぼすことを特徴とする。 (もっと読む)
道路曲率推定システム
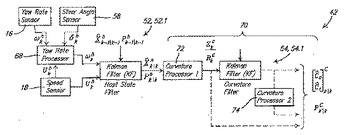
第1のカルマンフィルタ(52、52.1)を使用するプロセッサ(26)が、ホスト車両状態を、速度(U)およびヨーレート(ω)から推定し、この後者は、速度(U)が閾値よりも大きい場合にはヨーレートセンサ(16)からとし、小さい場合には、操舵角センサおよび速度(U)からとすることができる。道路曲率パラメータ(C0、C1)は、ホスト車両軌跡のカーブフィットから、または状態変数が複数のホスト状態変数(72、72)に応答性のある、第2のカルマンフィルタ(54、54.1)から推定される。カルマンフィルタ(52、52.1、54、54.1)には、適応スライドウィンドを組み入れることができる。最も可能性の高い道路種類の曲率は、異なる道路種類のモデルを使用する相互作用多重モデル(IMM)アルゴリズムによって推定される。道路曲率融合サブシステム(96)は、ホスト車両状態、車両位置(86)に応答性のあるマップデータベース(88)、またはレーダーシステム(14)によるターゲット車両(36)の計測値のいずれかを使用する、複数の道路曲率推定器(42.1、42.2、42.N)からの道路曲率推定値を融合させる。
 (もっと読む)
(もっと読む)
車両の運転者による不注意を識別する方法及びコンピュータプログラム
【課題】 車両の運転者による不注意を識別する方法及びコンピュータプログラムを提供する。
【解決手段】 このような方法が、基本的に先行技術より知られており、先行技術に開示されている方法は、実際のところ、車両内のステアリング角を評価するが、任意のハンドル静止段階を検出し、次いで、ハンドル静止段階を識別した際に、運転者が不注意な状態であることを推論するに過ぎない。運転者による不注意の存在に関して、より信頼性の高い報告を行うことができるようにするために、本発明は、ハンドル静止段階に加えて、ハンドル静止段階に続くハンドル動作も観測することを提案する。
最後に、発見されたハンドル静止段階の程度及びハンドル動作の程度が互いに論理的に連係され、次いで、この論理演算の結果が、運転者の不注意の重大度についての測度として使用される。
(もっと読む)
7,271 - 7,280 / 7,349
[ Back to top ]