
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,291 - 7,300 / 7,349
自動車安全装置用の物体認識装置および方法
本発明は、少なくとも1つの電磁波(12)を発生するために構成されている信号源(11)および障害物(16)から反射される少なくとも1つの電磁波(18)用の受信機(14)を備えた自動車搭乗者保護システム用物体認識装置に関する。本発明によれば、評価装置(20)が設けられて、障害物(16)から反射されかつ受信機(14)によって受信される少なくとも1つの電磁波(18)の偏波を評価し、かつ少なくとも1つの評価信号(22)を発生するように構成されている。それにより、例えば表面構造のように障害物に関する付加的な情報を得て、自動車搭乗者保護システムのために使用することが可能である。 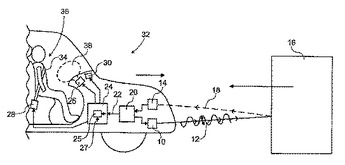 (もっと読む)
(もっと読む)
自動二輪車用の走行支援方法および走行支援システム
【課題】 技量のあるライダーでもそうでないライダーであっても、適切な走行支援を実行できる自動二輪車用の走行支援方法を提供する。
【解決手段】 自動二輪車の走行情報を利用して走行を支援する方法であって、自動二輪車が所定のカーブを走行する際に(S10)、カーブの走行条件をライダーに通知する工程(S20)を包含し、前記カーブの走行条件として、予め記録しておいた走行情報に基づき算出され、ライダーの技量レベルに対応して変更可能な走行適正値と、実際の走行状態の値との対比結果が前記ライダーに通知される、自動二輪車用の走行支援方法である。
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 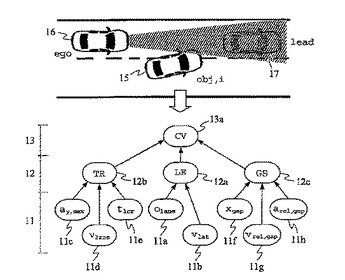 (もっと読む)
(もっと読む)
自動二輪車用の走行情報表示方法および走行情報表示システム
【課題】 バンク角等の走行条件を容易に把握することができる自動二輪車用の走行情報表示方法を提供する。
【解決手段】 自動二輪車のバンク角を取得する工程(S10)と、バンク角(152,154)を自動二輪車の走行コース150に沿って表示する工程(S20)とを包含する自動二輪車用の走行情報表示方法であり、工程(S20)において、バンク角(152,154)の度合いは、走行コース150から外れる度合いによって表示されることを特徴とする。
(もっと読む)
車両周辺部を可視化するための方法及び装置
車両周辺部を可視化するための方法、特に暗視情報システムを用いて運転者の前方にある交通状況を検出及び描写するための方法であって、異なるスペクトル領域から殆ど同所同時のビデオ画像が融合され、ビデオ画像の融合時、異なるスペクトル領域に重み係数が備えられる、前記方法において、第1にビデオ画像が全域的に調節された予備的な重み係数で重み付けられること、第2に対象認識システムを使ってビデオ画像の対象分析が実施されること、及び第3に対象分析に基づいて重み係数の対象選択式の局所的な適合が行なわれること。 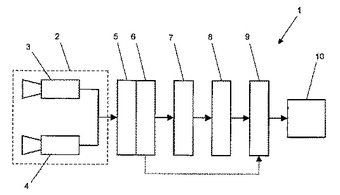 (もっと読む)
(もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
検出装置の検出領域で障害物を検出する方法
この発明は、障害物の存在する空間をモニタするための方法および装置に関する。このモニタ装置は、通常、少なくとも1つの送信装置と第1および第2の受信装置を有する。この発明の目的は、情報の信頼性を改善する方法および装置を提供することである。この目的のために、第1受信装置よりも送信装置からより離隔している第2受信装置の信号が、その寄生信号部分のために評価される。第1および第2受信装置間の距離があまりに大きくなければ、この第2受信信号に検知される寄生信号部分が、第1信号にも含まれていると仮定することができる。この場合に、望ましいことは、その空間をモニタすることを中止すること、あるいは、少なくとも寄生信号部分が第2受信信号の繰返し評価において検知されない間に既に得られたこの検知のいかなる結果をも破棄することである。 (もっと読む)
自動車用の情報システム
本発明は、運転者が自動車を運転しているときに、運転者に影響を与える要因に従って、情報を提供するためのシステムに関する。さらに、自動車には、運転者によって動作又は開始される機能が、それに対応する情報と共に提供され、この情報量の多さにより、運転者が、この種類の機能の動作又は作動中に、又は提供された情報を読む間に、大きすぎる負荷の下に置かれるか又は交通状況に対して注意散漫になるという危険が生じ、事故を起こす危険性が高くなる。本発明の目的は、運転者の集中力を下げることのないように操作の複雑さを大幅に簡略化する上述の種類のシステムを提供することである。本発明によれば、情報は、運転者に客観的に影響を与える負荷要因と、運転者動作と、車両の運転に影響を与える運転者の特定の特性とに従って伝達される。運転者に対する負荷を軽減するために、本発明のシステムを自動車に有利に使用でき、このようにして、運転者が運転状態の大部分で負荷を受けないことが保証されて、リラックスした状態で車両を運転することが可能になる。 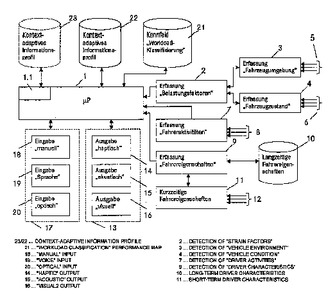 (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 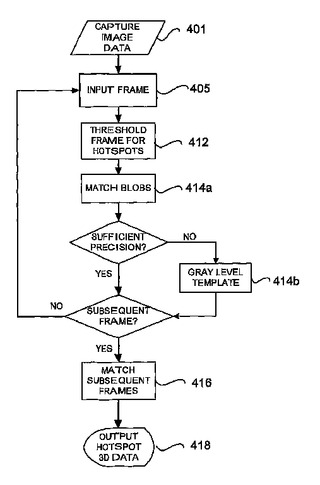 (もっと読む)
(もっと読む)
路上における自動車の位置決定方法及び装置
本発明は路上(3)における自動車(2)の位置(1)決定方法に関する。このために、道路の幾何学的データ(4)及び行路データ(5)が記録され、自動車(2)の道路(3)に対する第1位置データ(1)が、記録された道路の幾何学的データ(4)及び行路データ(5)から算出される。本発明の特徴は、道路のコースデータ(6)が、これも又道路の幾何学的データ(4)と行路データ(5)とから算出されること、第1車両(2)に追随する車両(2’)のこの車両(2)に対する第2位置データ(7)が記録されること、及び、後続車両(2’)の道路(3)に対する第3位置データ(8)が、道路のコースデータ(6)と、車両(2)の第1位置データ(1)と、後続車両(2’)の第2位置データ(7)とから算出されること、にある。 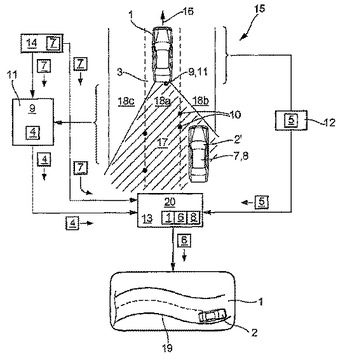 (もっと読む)
(もっと読む)
7,291 - 7,300 / 7,349
[ Back to top ]