
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,311 - 7,320 / 7,349
カーブ半径推定装置
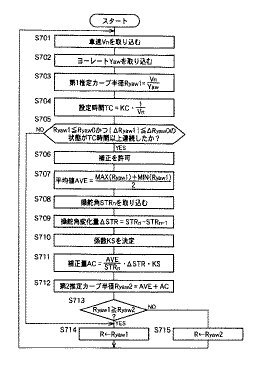
【課題】自車両がこれから走行しようとする道路のカーブ半径を推定するために自車両の実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減する。
【解決手段】自車両の実車速Vnと実ヨーレートYawと実操舵角STRとに基づいて、自車両がこれから走行すべき道路のカーブ半径Ryawを推定する(S701ないしS703およびS708ないしS715)。したがって、自車両の過渡状態において実ヨーレートより正確に自車両の旋回挙動を反映し得る実操舵角を考慮しつつ、実ヨーレートを用いてカーブ半径を推定することが可能となり、よって、カーブ半径を推定するために実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減することが容易となる。
(もっと読む)
車載カメラの光軸ずれ検出装置

【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
車両用後側方監視装置
【課題】夜間やトンネルなど後側方が暗い場合であっても、1つの撮像手段で接近物監視及び白線監視の両者を行うことができる車両用後側方監視装置を提供する。
【解決手段】CPU22Aが、後側方に向けて自車両に搭載されたカメラ10により撮像された画像信号を画像処理して、自車両に近づいてくる接近物を監視する。また、CPU22Aは、カメラ10により撮像された画像信号を画像処理して、自車両が走行する自車線の両側に位置する白線を監視する。CPU22Aは、さらに、白線監視時のカメラ10の光感度が、接近物監視時のカメラ10の光感度より高くなるように、カメラ10の光感度を制御する。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
障害物存在可能性検出装置及び障害物検出装置
【課題】 障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができるようにすること。
【解決手段】 自車両の走行環境をナビゲーションシステム17で検出し、その検出結果に基づいて、自車両前方に障害物が存在する可能性の大きさを検出し、車間距離センサ12で先行車両を継続して検出できた時間が先行車検知時間以上であるときに当該先行車両を走行車線上の障害物であると判断し、さらに渋滞等で障害物が存在する可能性が大きいときには前記先行車検知時間を小さくすると共に、前記可能性が小さいときには前記先行車検知時間を大きくするようにした。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
移動体用ナビゲーションシステム及び方法並びにコンピュータプログラム
【課題】 道路の混雑状態、道路の法律的又は地形的条件、ドライバーの生体状態、車の走行状態等から総合的に判断して、ドライバーに追い越し可能な旨の情報を提示する。
【解決手段】 移動体用ナビゲーションシステムは、移動体の走行を制御するACC等の走行制御手段と、移動体の現在位置を検出するGPS等の現在位置検出手段と、検出された現在位置に対応する所定の範囲内の地図情報を提示するナビゲーションマップ等の地図情報提示手段と、検出された現在位置の経路状況情報を提示する無線等の経路状況情報提示手段と、地図情報及び経路状況情報に基づき移動体操縦者に対して追い越し可能である旨を情報を提示するCPU、スピーカ、ディスプレイ等の操縦路提示手段を具備する。更に、ドライバーの生体状態を検出する脈拍センサ等の生体情報検出手段を備え、ドライバーの肉体的、精神的状態を判断して追い越し可能な旨の情報を提供する。
(もっと読む)
車載用通信装置及びその方法
【課題】 車を運転している運転者に電話をかけた場合において、運転者が応答できないときであっても、発信者がその後に何度も電話を繰り返してかけたりする事態を回避することができる車載用通信装置を提供する。
【解決手段】 車載用の通信装置300は、車の状態を検出する車載センサ311〜316と、電話装置100を通信可能に接続する通信インタフェース340と、通信インタフェース340を介して電話装置100を制御する制御装置380とを備え、制御装置380は、車載センサ311〜316が検出した着信時の車の状態を取得し、電話装置100への着信検出時に取得した車の状態に基づいて運転者が着信に応答することが危険か否か判断し、危険と判断した場合にその時点での車の運行状況に依存する情報である車情報を含めた応答メッセージを作成し、相手側装置に送信する。
(もっと読む)
車両の走行安全支援システム
【課題】 高速道路のインタチェンジの合流部付近での車両の走行の安全性を高める車両の走行安全支援システムを提供する。
【解決手段】 高速道路のインターチェンジの合流部付近の上及び支線と隣接する本線上を走行する車両の状況を把握するための画像センサと、この画像センサで撮像された画像から車両を認識して、その車両の位置、速度を検出する画像処理装置と、この画像処理装置で検出された車両状況から本線上において支線と隣接する第1車線を走行する車両に対して、せいぎょ情報を送るべきかどうか判定し、送るべきと判定したときに該制御情報をを作成する制御装置と、この制御装置で作成された制御情報を本線の上の第1車線を走行中の車両のドライバに注意情報として、表示する情報板とを具えた。
(もっと読む)
高度ドライバ支援システムに対するマップ・データ・アーキテクチャ・プラットフォーム
【課題】 自動車両が経路路を走行する時に、前記自動車両が、前記自動車両の現在位置から走行することができる経路路に沿った経路に関する更新されたデータを継続的に供給する、自動車両のためのデータ・アーキテクチャである。
【解決手段】 データ・アーキテクチャは、地理学的領域における経路路に関するデータを含むマップ・データベース及びマップ・データベースにおけるデータによって表される経路路セグメントに沿った現在位置を示す出力を供給するために、センサからのデータの使用する車両測位プログラムを使用する。データ・アーキテクチャはまた、しきい値と関連する範囲まで、現在の車両位置から拡張する、自動車両が走行することができる一つ以上の経路を決定するために、車両測位プログラムの出力及びマップ・データベースからのデータを使用するデータ・ホリゾン・プログラムも含む。データ・ホリゾン・プログラムによって決定される経路を表すデータは、ドライバ支援システムがデータを取得することができるデータ・リポジトリに記憶される。
(もっと読む)
7,311 - 7,320 / 7,349
[ Back to top ]